# Technical Document Extraction: Control Value Analysis Over Time
## Title
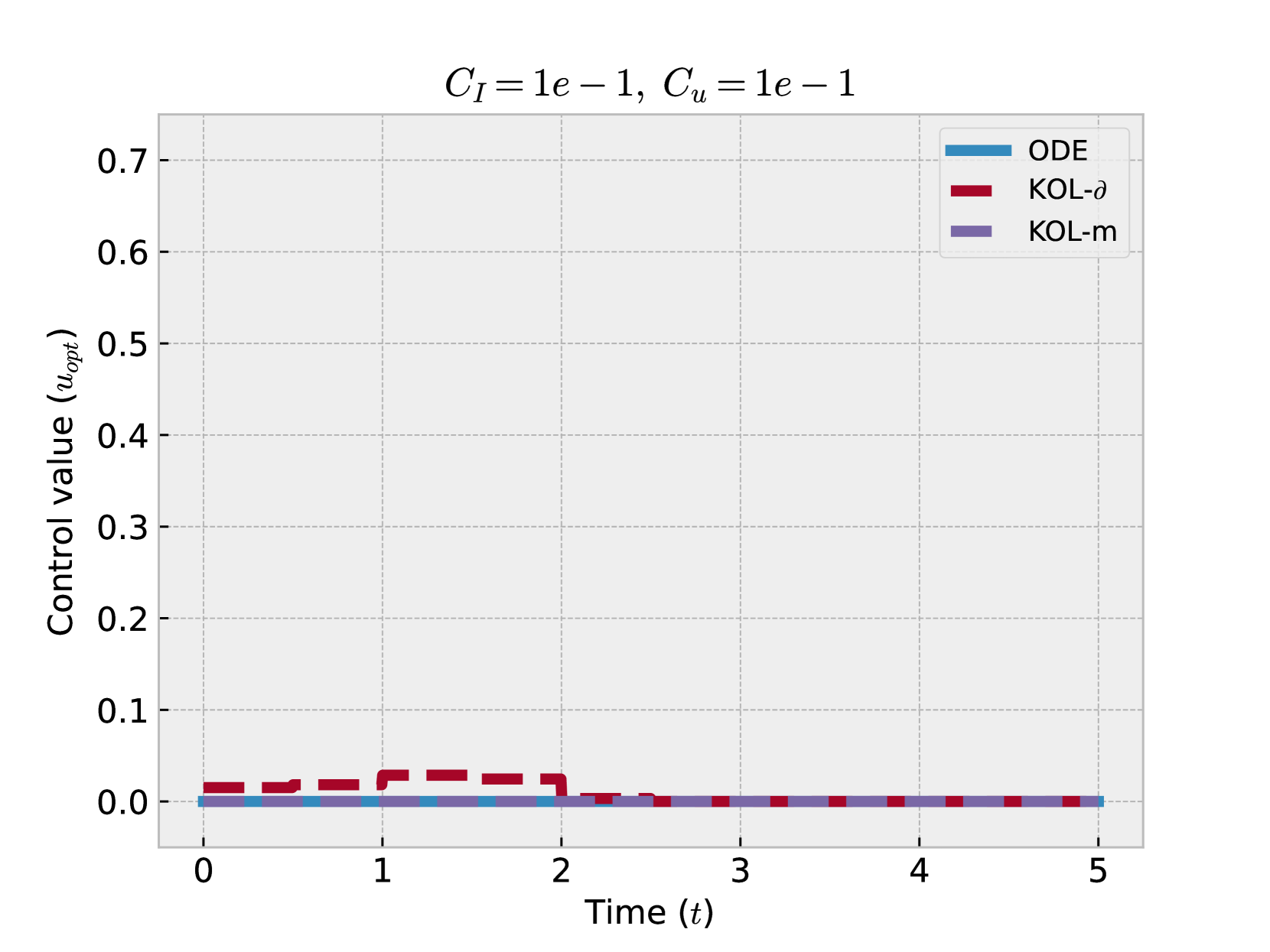
**Control Value (u_opt) Analysis**
*Parameters: C_I = 1e-1, C_u = 1e-1*
---
### Axes Labels
- **X-axis**: Time (t)
- Range: 0 to 5
- Increment: 1
- **Y-axis**: Control value (u_opt)
- Range: 0 to 0.7
- Increment: 0.1
---
### Legend
- **ODE**: Blue line
- **KOL-δ**: Red line
- **KOL-m**: Purple line
---
### Line Descriptions
1. **ODE (Blue)**
- **Behavior**: Flat line at y = 0 across all time points (t = 0 to t = 5).
- **Key Observation**: No deviation from baseline control value.
2. **KOL-δ (Red)**
- **Behavior**:
- Starts at y ≈ 0.01 (t = 0).
- Sharp spike to y ≈ 0.05 at t ≈ 1.5.
- Returns to y ≈ 0.01 at t ≈ 2.5.
- Remains flat at y ≈ 0.01 for t > 2.5.
- **Key Observation**: Transient control value spike at t ≈ 1.5.
3. **KOL-m (Purple)**
- **Behavior**: Flat line at y = 0 across all time points (t = 0 to t = 5).
- **Key Observation**: No deviation from baseline control value.
---
### Key Trends
- **ODE and KOL-m**: Maintain constant control values (u_opt = 0) throughout the observed time period.
- **KOL-δ**: Exhibits a transient increase in control value at t ≈ 1.5, followed by a return to baseline.
- **Grid**: Dotted grid lines at x = 0, 1, 2, 3, 4, 5 and y = 0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7 for reference.
---
### Additional Notes
- **Control Parameters**:
- C_I (Input Control): 1e-1
- C_u (Uncertainty Control): 1e-1
- **Visualization**: Line graph with three distinct control strategies compared over time.
---
### Cross-Reference Validation
- **Legend Colors vs. Line Colors**:
- Blue (ODE) matches blue line.
- Red (KOL-δ) matches red line.
- Purple (KOL-m) matches purple line.
- **Axis Markers**: All labels and increments explicitly stated in the image.
---
### Conclusion
The graph demonstrates that ODE and KOL-m strategies maintain stable control values, while KOL-δ exhibits a transient response. This suggests KOL-δ may be sensitive to specific time intervals, whereas ODE and KOL-m are robust to temporal variations under the given parameters (C_I = 1e-1, C_u = 1e-1).