## Diagram: Recurrent Neural Network for Robotic Control
### Overview
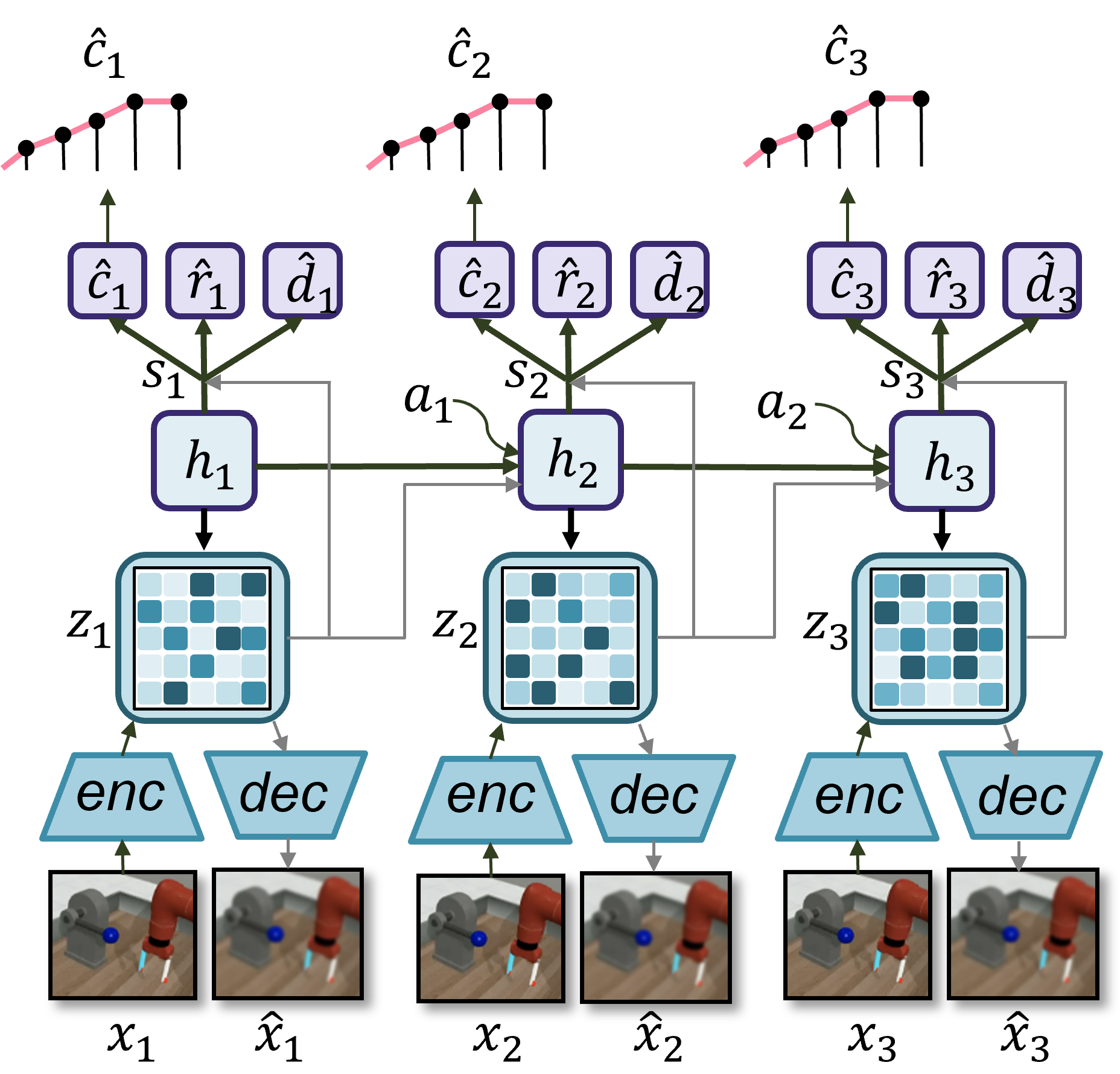
The image depicts a recurrent neural network (RNN) architecture, likely used for controlling a robotic arm. The diagram illustrates the flow of information through the network over three time steps. It includes input images, encoding and decoding layers, hidden states, and predicted control parameters.
### Components/Axes
* **Time Steps:** The diagram shows three time steps, indexed by 1, 2, and 3.
* **Input Images (x):** At the bottom, there are pairs of images at each time step, labeled as x1, x̂1, x2, x̂2, x3, x̂3. The 'x' likely represents the input image, and 'x̂' represents the reconstructed or predicted image.
* **Encoder (enc):** A light blue trapezoid labeled "enc" represents the encoder network. It takes the input image (x) and transforms it into a latent representation (z).
* **Decoder (dec):** A light blue trapezoid labeled "dec" represents the decoder network. It takes the latent representation (z) and reconstructs the image (x̂).
* **Latent Representation (z):** The square boxes labeled z1, z2, and z3 represent the latent representations at each time step. These boxes contain a grid of smaller squares, each with varying shades of blue, suggesting a matrix or tensor representation.
* **Hidden State (h):** The rounded rectangles labeled h1, h2, and h3 represent the hidden states of the RNN at each time step.
* **Control Parameters (ĉ, r̂, d̂):** At the top, there are three rounded rectangles at each time step, labeled ĉ1, r̂1, d̂1, ĉ2, r̂2, d̂2, ĉ3, r̂3, d̂3. These likely represent the predicted control parameters for the robotic arm, such as position (ĉ), rotation (r̂), and depth (d̂).
* **Control Parameter Visualization:** Above each set of control parameters (ĉ1, ĉ2, ĉ3), there is a small graph. The x-axis represents time, and the y-axis represents the value of the control parameter. A pink line connects the data points, showing the trend of the control parameter over time.
* **Arrows:** Arrows indicate the flow of information through the network. Dark green arrows represent the primary flow, while gray arrows represent recurrent connections.
* **Recurrent Connections (a):** The gray arrows labeled a1 and a2 represent the recurrent connections, feeding the hidden state from the previous time step into the current time step.
* **State Connections (s):** The dark green arrows labeled s1, s2, and s3 connect the hidden state to the control parameters.
### Detailed Analysis
* **Input Images:** The images at the bottom show a robotic arm interacting with an object (possibly a blue sphere). The "x" images are likely the real images, while the "x̂" images are the reconstructions generated by the decoder. The reconstructed images appear slightly blurred.
* **Encoder-Decoder:** The encoder-decoder structure suggests that the network is learning a compressed representation of the input images. This representation is then used to reconstruct the images and predict the control parameters.
* **Hidden State:** The hidden state acts as a memory, storing information from previous time steps. This allows the network to make decisions based on the history of the robot's actions and observations.
* **Control Parameters:** The control parameters are the output of the network, and they determine the actions of the robotic arm. The graphs above the control parameters provide a visualization of how these parameters change over time.
* **Recurrent Connections:** The recurrent connections allow the network to maintain a state over time, enabling it to learn complex sequences of actions.
* **Control Parameter Visualization Details:**
* **ĉ1:** The pink line starts low and increases steadily. The black dots are at approximately y=0.2, 0.4, 0.6, 0.8.
* **ĉ2:** The pink line starts low and increases steadily. The black dots are at approximately y=0.2, 0.4, 0.6, 0.8.
* **ĉ3:** The pink line starts low and increases steadily. The black dots are at approximately y=0.2, 0.4, 0.6, 0.8.
### Key Observations
* The network appears to be processing sequential data, as evidenced by the time steps and recurrent connections.
* The encoder-decoder structure suggests that the network is learning a compressed representation of the input images.
* The hidden state plays a crucial role in maintaining a memory of past events.
* The control parameters are the output of the network and determine the actions of the robotic arm.
### Interpretation
The diagram illustrates a recurrent neural network designed for controlling a robotic arm. The network takes input images, encodes them into a latent representation, and uses this representation to predict control parameters. The recurrent connections allow the network to maintain a state over time, enabling it to learn complex sequences of actions. The encoder-decoder structure suggests that the network is learning a compressed representation of the input images, which is then used to reconstruct the images and predict the control parameters. This architecture is well-suited for tasks that require sequential decision-making, such as robotic control. The network learns to map visual inputs to appropriate motor commands, enabling the robot to perform complex tasks.