## Diagram: Robotic Navigation Task Examples
### Overview
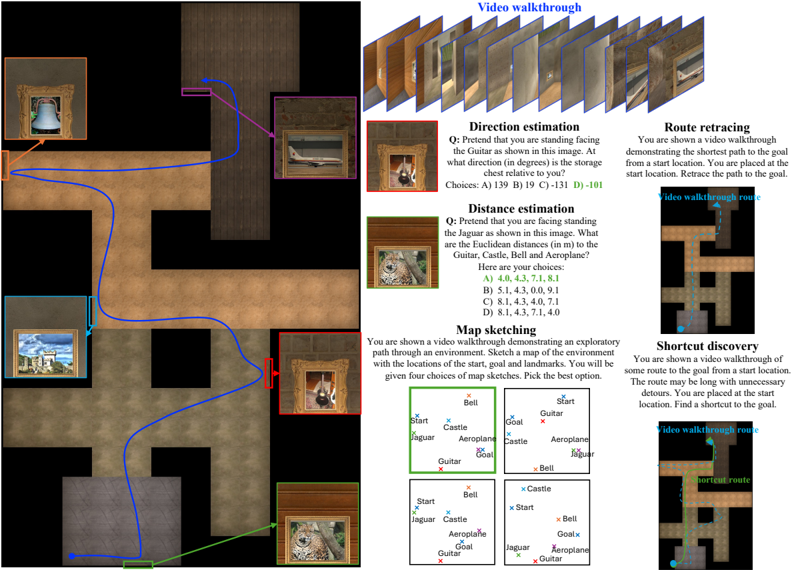
The image presents a collage of screenshots demonstrating various tasks within a robotic navigation environment. The tasks involve direction estimation, distance estimation, map sketching, route retracing, and shortcut discovery. Each task is presented with a visual scenario and multiple-choice questions. The overall theme is evaluating a robot's ability to understand and navigate a complex environment.
### Components/Axes
The image is divided into several sections, each representing a different task. Each section contains:
* **Visual Scenario:** A first-person view from a robot navigating an indoor environment with objects like a guitar, castle, bell, airplane, and jaguar.
* **Question:** A text-based question related to the visual scenario.
* **Choices:** Multiple-choice answers (A, B, C, D) to the question.
* **Header:** "Video walkthrough" with a series of small images depicting a robot moving through a similar environment.
### Detailed Analysis or Content Details
**1. Direction Estimation:**
* **Question:** "Q: Pretend that you are standing facing the Guitar as shown in this image. At what direction (in degrees) is the storage chest relative to you?"
* **Choices:** A) 130 B) 19 C) 131 D) -101
**2. Distance Estimation:**
* **Question:** "Q: Pretend that you are facing standing the Jaguar as shown in this image. What are the Euclidean distances (in m) to the Guitar, Castle, Bell and Aeroplane?"
* **Choices:**
* A) 4.0, 4.3, 7.1, 8.1
* B) 5.1, 4.3, 0.0, 9.1
* C) 8.1, 4.3, 4.0, 7.1
* D) 8.1, 4.3, 7.1, 4.0
**3. Map Sketching:**
* **Question:** "You are shown a video walkthrough demonstrating an exploratory path through an environment. Sketch a map of the environment with the locations of the start, goal and landmarks. You will be given four choices of map sketches. Pick the best option."
* **Map Options (Four Sketches):** Each sketch depicts the relative positions of "Start", "Goal", "Guitar", "Castle", "Bell", "Aeroplane", and "Jaguar". The sketches vary in the arrangement of these elements.
**4. Route Retracing:**
* **Question:** "You are shown a video walkthrough demonstrating the shortest path to the goal from a start location. You are placed at the start location. Retrace the path to the goal."
* **Visual:** A screenshot showing a path traced from a starting point to a goal point within a room.
**5. Shortcut Discovery:**
* **Question:** "You are shown a video walkthrough of some route to the goal from a start location. The route may be long with unnecessary detours. You are placed at the start location. Find a shortcut to the goal."
* **Visual:** A screenshot showing a path traced from a starting point to a goal point within a room, with a highlighted "shortcut route".
**Header Images:**
The header contains a series of approximately 10 small images showing a robot navigating a similar indoor environment. The robot appears to be a small, wheeled device.
### Key Observations
* The tasks are designed to assess different aspects of robotic navigation, including spatial reasoning, distance estimation, and path planning.
* The visual scenarios are consistent across tasks, using the same environment and objects.
* The multiple-choice questions require the user to interpret the visual information and apply their understanding of spatial relationships.
* The map sketching task is particularly challenging, as it requires the user to create a mental representation of the environment.
### Interpretation
The image demonstrates a series of tests designed to evaluate a robot's ability to perform complex navigation tasks in a realistic indoor environment. The tasks move from basic spatial reasoning (direction and distance estimation) to more advanced skills like map building and path planning. The inclusion of "shortcut discovery" suggests an emphasis on efficient navigation and the ability to adapt to changing circumstances. The use of multiple-choice questions allows for quantitative assessment of the robot's performance. The header images provide context, showing the robot actively exploring the environment. The overall goal appears to be to develop and test algorithms that enable robots to navigate and interact with the world in a more intelligent and autonomous way. The tasks are designed to mimic real-world scenarios, making the evaluation more relevant and practical. The consistent environment and objects across tasks allow for a controlled comparison of the robot's performance on different challenges.