TECHNICAL ASSET FINGERPRINT
0ab4f5b2bcd293f8f50ae1bb
Click to view fullscreen
Press ESC or click to close
FOUND IN PAPERS
EXPERT: healer-alpha-free VERSION 1
RUNTIME: free/openrouter/healer-alpha
INTEL_VERIFIED
## Diagram: Spatial Navigation Task Environment
### Overview
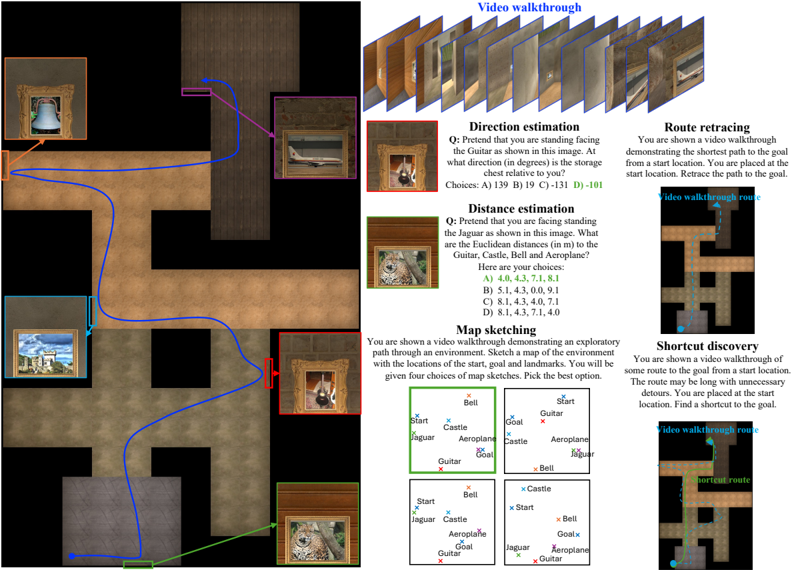
The image is a composite diagram illustrating a set of spatial navigation and reasoning tasks within a simulated 3D environment. It consists of two primary sections: a large, top-down map of an environment on the left, and a series of smaller panels on the right that define specific tasks (Direction estimation, Distance estimation, Map sketching, Route retracing, Shortcut discovery). The overall purpose is to present a benchmark or test for evaluating an agent's (human or AI) spatial understanding based on visual walkthroughs.
### Components/Axes
**Left Panel - Environment Map:**
* **Type:** Top-down, textured floor plan of a maze-like environment.
* **Objects (with colored frames):**
* **Bell:** Top-left, orange frame.
* **Guitar:** Top-right, purple frame.
* **Castle:** Center-left, blue frame.
* **Aeroplane:** Center-right, red frame.
* **Jaguar:** Bottom-center, green frame.
* **Goat:** Bottom-right, brown frame.
* **Paths/Lines:**
* A **blue line** connects the Bell (top-left) to the Goat (bottom-right), passing through the central area.
* A **purple line** connects the Guitar (top-right) to the Goat (bottom-right).
* A **green line** connects the Jaguar (bottom-center) to the Goat (bottom-right).
* **Spatial Layout:** The environment has distinct rooms or alcoves where objects are placed, connected by corridors. The start location is not explicitly marked on this main map.
**Right Panel - Task Descriptions:**
The right side is divided into five distinct task modules, each with a title, a question/instruction, and supporting visuals.
1. **Video walkthrough (Top):**
* **Content:** A sequence of 10 small, sequential first-person perspective images showing a path through the environment. This serves as the primary input for the subsequent tasks.
2. **Direction estimation:**
* **Question:** "Q: Pretend that you are standing facing the Guitar as shown in this image. At what direction (in degrees) is the storage room?"
* **Image:** A first-person view facing the Guitar (purple frame).
* **Choices:** A) 139° B) 19° C) -131° D) -181°
3. **Distance estimation:**
* **Question:** "Q: Pretend that you are facing standing the Jaguar as shown in this image. What are the Euclidean distances (in m) to the Guitar, Castle, Bell and Aeroplane?"
* **Image:** A first-person view facing the Jaguar (green frame).
* **Choices:**
* A) 4.0, 4.3, 7.1, 8.1
* B) 5.1, 4.3, 0.0, 9.1
* C) 4.0, 4.3, 7.1, 9.1
* D) 8.1, 4.3, 7.1, 10
4. **Map sketching:**
* **Instruction:** "You are shown a video walkthrough demonstrating an exploratory path through an environment. Sketch a map of the environment with the locations of the Bell, Guitar, Castle, Aeroplane, Jaguar and Goat. You will be given four choices of map sketches. Pick the right option."
* **Visuals:** Four small schematic map options (labeled A, B, C, D implicitly by position). Each map plots the six objects as labeled points (x marks) in a 2D space. The correct map (top-left, green border) shows a spatial arrangement consistent with the large map on the left.
5. **Route retracing:**
* **Instruction:** "You are shown a video walkthrough demonstrating the shortest path to the goal from a start location. You are placed at the start location. Retrace the path to the goal."
* **Visual:** A top-down map snippet showing a path labeled "video walkthrough route" (cyan line) from a "Start" point to a "Goal" point.
6. **Shortcut discovery:**
* **Instruction:** "You are shown a video walkthrough of some route to the goal from a start location. The route may be longer than necessary. You are placed at the start location. Find a shortcut to the goal."
* **Visual:** A top-down map snippet showing a longer "video walkthrough route" (cyan line) and a shorter "shortcut route" (green line) between the same "Start" and "Goal" points.
### Detailed Analysis
**Task Flow and Relationships:**
The tasks form a progressive evaluation of spatial cognition:
1. **Perception & Memory:** The "Video walkthrough" provides the raw visual experience.
2. **Egocentric Reasoning:** "Direction estimation" and "Distance estimation" require the agent to adopt a specific viewpoint (facing an object) and calculate spatial relationships from that first-person perspective.
3. **Allocentric Mapping:** "Map sketching" requires synthesizing the sequential visual information into a coherent, top-down, third-person map.
4. **Path Planning:** "Route retracing" tests the ability to execute a known optimal path. "Shortcut discovery" tests the ability to infer a more efficient path than the one demonstrated, requiring a deeper understanding of the environment's connectivity.
**Spatial Grounding of Objects (from Left Map):**
* **Bell:** Located in a northwestern room.
* **Guitar:** Located in a northeastern room.
* **Castle:** Located in a western alcove.
* **Aeroplane:** Located in an eastern alcove.
* **Jaguar:** Located in a southern central room.
* **Goat:** Located in a southeastern room, acting as a hub where multiple paths (blue, purple, green) converge.
**Data Points from Multiple Choice:**
* **Direction Estimation:** The correct answer is not determinable from the image alone without performing the mental rotation. The options suggest the storage room is at an oblique angle relative to the Guitar-facing viewpoint.
* **Distance Estimation:** The choices provide sets of four Euclidean distances. The correct set (likely **A or C**, as they share three similar values) would reflect the actual metric distances from the Jaguar to the other four objects. The presence of "0.0" in option B is a clear outlier, likely incorrect unless two objects are co-located.
* **Map Sketching:** The top-left map option (with a green border) appears correct based on the large reference map. It shows: Bell (NW), Guitar (NE), Castle (W), Aeroplane (E), Jaguar (S), Goat (SE).
### Key Observations
1. **Hub-and-Spoke Layout:** The Goat's location serves as a central hub, directly connected to the Bell, Guitar, and Jaguar via distinct paths. This is a key topological feature.
2. **Task Dependency:** All tasks depend on the initial "Video walkthrough." The quality of spatial representation built from that walkthrough determines performance on all subsequent tasks.
3. **Visual Cues:** The colored frames around objects in the first-person views (e.g., facing the Guitar or Jaguar) are critical for grounding the egocentric questions.
4. **Ambiguity in "Storage Room":** The "Direction estimation" question references a "storage room" which is not labeled on the main map. This implies it is either a known landmark from the video walkthrough or a generic term for an unmarked area, adding a layer of inference.
### Interpretation
This diagram outlines a comprehensive benchmark for **embodied spatial intelligence**. It moves beyond simple object recognition to test the core cognitive abilities required for navigation: building a persistent mental map from sequential visual input, performing perspective-taking (egocentric to allocentric transformation), estimating metric properties (distance, angle), and planning efficient routes.
The **Peircean investigative reading** reveals that the tasks are designed to expose the underlying *spatial model* an agent constructs. For instance:
* An agent that fails "Map sketching" but succeeds at "Route retracing" may have a procedural, route-based understanding without a survey map.
* An agent that fails "Shortcut discovery" likely lacks a complete topological model of the environment's connectivity.
* Discrepancies between estimated and actual distances/directions would reveal systematic biases in the agent's spatial representation (e.g., consistent underestimation of distances to objects in peripheral rooms).
The environment's design—with distinct objects, clear pathways, and a central hub—is intentionally structured to make spatial relationships verifiable. The inclusion of both egocentric and allocentric tasks ensures the evaluation captures the full spectrum of spatial reasoning, making this a robust framework for assessing navigation capabilities in AI systems. The "storage room" ambiguity is particularly insightful, as it tests the ability to handle and infer information about unmarked but functionally significant locations.
DECODING INTELLIGENCE...