\n
## Image Series: Robotic Manipulation Sequence
### Overview
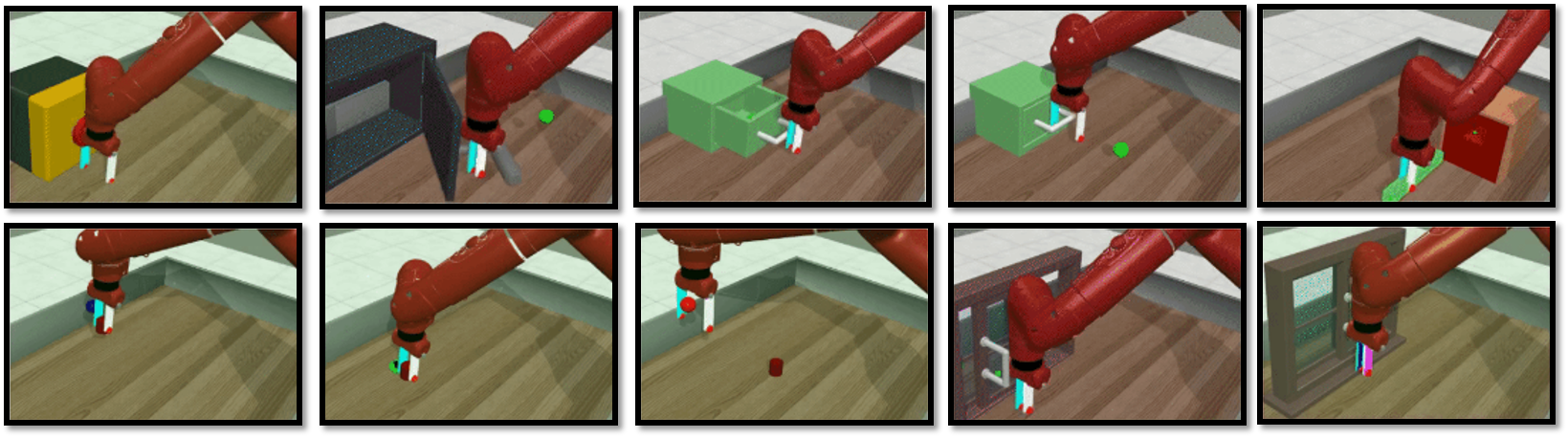
The image presents a series of ten snapshots depicting a robotic arm interacting with various objects in a simulated environment. The sequence appears to demonstrate a manipulation task, potentially involving picking, placing, and assembling objects. The environment includes a tiled floor, and various geometric shapes (cubes, rectangular prisms, cylinders) of different colors. A small green sphere is consistently present in the scene, potentially serving as a target or reference point.
### Components/Axes
There are no explicit axes or legends in the image. The components are:
* **Robotic Arm:** A red, multi-jointed robotic arm is the primary actor in all frames.
* **Objects:** Various geometric shapes (cubes, rectangular prisms, cylinders) in colors yellow, green, red, and gray.
* **Green Sphere:** A small, consistently present green sphere.
* **Environment:** A tiled floor and simple geometric structures.
### Detailed Analysis or Content Details
The sequence can be broken down as follows:
1. **Frame 1:** The robotic arm is positioned above a yellow rectangular prism. The gripper is open.
2. **Frame 2:** The robotic arm is grasping a gray rectangular prism.
3. **Frame 3:** The robotic arm is positioned above a green rectangular prism. The gripper is open.
4. **Frame 4:** The robotic arm is grasping the green rectangular prism. The green sphere is visible.
5. **Frame 5:** The robotic arm is holding a red triangular prism.
6. **Frame 6:** The robotic arm is positioned above a structure composed of blue and white rectangular prisms.
7. **Frame 7:** The robotic arm is grasping a red cylinder.
8. **Frame 8:** The robotic arm is holding the red cylinder, which has been released and is now on the floor.
9. **Frame 9:** The robotic arm is positioned above a structure composed of gray and white rectangular prisms.
10. **Frame 10:** The robotic arm is grasping a white rectangular prism.
### Key Observations
* The robotic arm appears to be performing a sequence of pick-and-place operations.
* The green sphere remains consistently in the scene, potentially acting as a visual guide or target.
* The objects being manipulated vary in shape and color.
* The environment is simple and uncluttered, likely designed to isolate the robotic manipulation task.
* The sequence suggests a possible assembly or sorting task.
### Interpretation
The image series demonstrates a robotic manipulation task in a simulated environment. The sequence suggests the robot is capable of identifying, grasping, and moving objects of different shapes and colors. The consistent presence of the green sphere hints at a potential guidance or targeting system. The overall purpose of the task is not explicitly stated, but it could be related to assembly, sorting, or object rearrangement. The simulation environment allows for controlled experimentation and evaluation of the robot's manipulation capabilities without the risks and costs associated with real-world deployment. The sequence is likely a demonstration of a robotic system's ability to perform complex manipulation tasks, potentially for use in manufacturing, logistics, or other automated applications. The lack of quantitative data (e.g., precise coordinates, forces applied) limits a deeper analysis, but the visual sequence provides a clear illustration of the robot's actions.