## Image Sequence: Robotic Arm Manipulation Tasks
### Overview
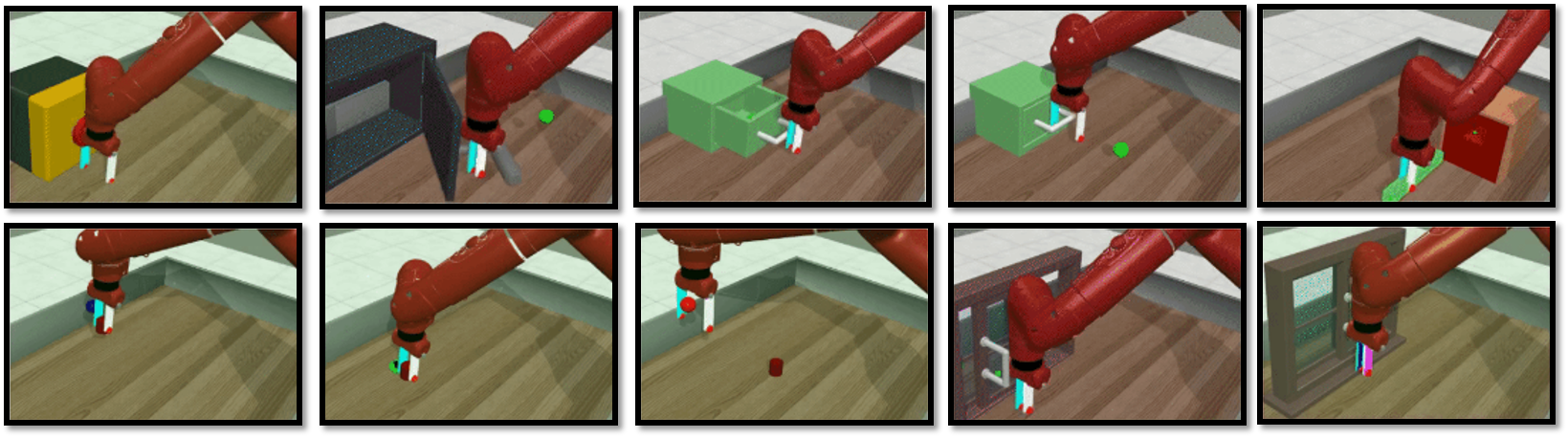
The image is a grid of 10 sequential photos depicting a red robotic arm performing various manipulation tasks in a simulated environment. The arm interacts with objects like boxes, drawers, and a ball, demonstrating reach, grasping, and placement capabilities. The environment features a wooden floor, white walls, and a tiled baseboard.
### Components/Axes
- **Robotic Arm**: Red cylindrical structure with a multi-jointed design, terminating in a gripper with colored tips (blue, red, green).
- **Objects**:
- Yellow and black box (top-left)
- Black cabinet (top-center)
- Green drawer unit (top-right)
- Red cylindrical object (bottom-center)
- Brown cabinet (bottom-right)
- **Environment**:
- Wooden floor with horizontal grain
- White walls with gray baseboard
- Tiled floor in some frames
### Detailed Analysis
1. **Top Row (Images 1-5)**:
- **Image 1**: Arm approaches yellow/black box; gripper tips colored blue and red.
- **Image 2**: Arm interacts with black cabinet; gripper tips blue and red.
- **Image 3**: Arm engages with green drawer unit; gripper tips blue and red.
- **Image 4**: Arm manipulates green drawer unit; green ball visible on floor.
- **Image 5**: Arm interacts with red cabinet; gripper tips blue and red.
2. **Bottom Row (Images 6-10)**:
- **Image 6**: Arm approaches black cabinet; gripper tips blue and red.
- **Image 7**: Arm manipulates red cylindrical object; gripper tips blue and red.
- **Image 8**: Arm interacts with brown cabinet; gripper tips blue and red.
- **Image 9**: Arm approaches brown cabinet; gripper tips blue and red.
- **Image 10**: Arm manipulates brown cabinet; gripper tips blue and red.
### Key Observations
- The robotic arm consistently uses a gripper with blue and red tips across all tasks.
- Objects vary in color (yellow, black, green, red, brown) and shape (boxes, drawers, cylinders).
- The sequence suggests a demonstration of task versatility, with no repeated object interactions.
- No visible text, labels, or legends in the images.
### Interpretation
This sequence likely illustrates a robotic arm's ability to adapt to diverse manipulation tasks in a controlled environment. The absence of repeated objects implies testing of generalization capabilities. The colored gripper tips may indicate different end-effector configurations or sensor feedback mechanisms. The structured progression of tasks suggests a controlled experiment or simulation, possibly for evaluating robotic precision, path planning, or object recognition algorithms. The lack of textual annotations in the images indicates that metadata (e.g., task descriptions, success metrics) would need to be provided separately in a technical report.