## Photograph: Humanoid Robot Prototype
### Overview
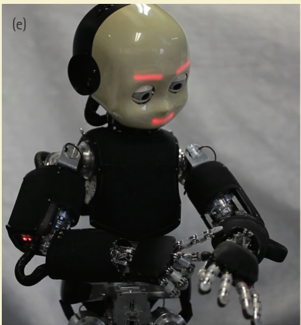
The image depicts a humanoid robot with a stylized, anthropomorphic design. Key features include a beige head with red facial markings (eyebrows and mouth), a black torso, silver mechanical joints, and articulated hands. The robot is positioned against a neutral gray fabric backdrop, suggesting a controlled environment like a lab or studio.
### Components/Axes
- **Head**:
- Material: Smooth, glossy beige polymer.
- Facial Features: Red LED-like eyebrows and mouth; no visible eyes (possibly covered or integrated into the head).
- Accessories: Black headphones or sensor array on the left side.
- **Torso**:
- Black, segmented casing with visible metallic actuators and wiring.
- Central compartment housing internal components (e.g., power systems, processors).
- **Limbs**:
- Arms: Black padded sleeves with exposed silver mechanical fingers and joints.
- Hands: Articulated fingers with metallic tips, designed for precision tasks.
- Left Arm: Red indicator light near the elbow joint.
- **Base/Stance**:
- Not fully visible; implied to be mounted on a stable platform.
### Detailed Analysis
- **Color Coding**:
- Red accents (eyebrows, mouth, left-arm light) may denote functional status or emotional expression.
- Silver components suggest high-precision engineering (e.g., titanium or aluminum alloys).
- **Design Philosophy**:
- Human-like proportions for interaction studies or public engagement.
- Modular construction for maintenance or customization.
- **Lighting**:
- Soft, diffused lighting highlights the robot’s texture and metallic elements.
### Key Observations
1. **Red Markings**: The red eyebrows and mouth could indicate a "neutral" or "alert" state, common in human-robot interaction research.
2. **Exposed Joints**: The visible mechanical components suggest a focus on transparency in design, possibly for educational purposes.
3. **Headphones/Sensors**: The black device on the head may serve as a microphone array or environmental sensor suite.
4. **Red Light**: Positioned on the left arm, this could signal operational status (e.g., active, error, or communication mode).
### Interpretation
The robot’s design prioritizes **human-like aesthetics** combined with **transparent mechanical functionality**, likely for applications in education, research, or public demonstration. The red accents may serve dual purposes: functional indicators and emotional expression to enhance user engagement. The absence of visible eyes or advanced sensors on the head implies a focus on tactile or auditory interaction over visual perception. The exposed joints and modular torso suggest a prototype stage, emphasizing adaptability and repairability over finalized commercialization.
No textual data, charts, or diagrams are present in the image. All analysis is based on visual inspection of the robot’s physical attributes and contextual clues.