## Diagram: Two-Link Robot Arm
### Overview
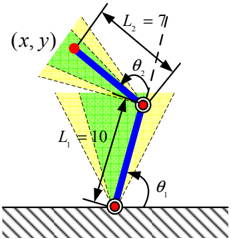
The image shows a diagram of a two-link robot arm with labeled lengths, angles, and a coordinate point. The arm is depicted in a 2D plane, with one end fixed to a horizontal surface and the other end free. The diagram includes visual representations of the arm's workspace.
### Components/Axes
* **Links:** Two blue links representing the robot arm segments.
* **Joints:** Three red circular joints connecting the links.
* **Base:** A hatched horizontal line representing the ground or base.
* **Workspace:** Green and yellow shaded areas indicating the possible range of motion.
* **Labels:**
* `(x, y)`: Coordinates of the free end of the arm.
* `L1 = 10`: Length of the first link.
* `L2 = 7`: Length of the second link.
* `θ1`: Angle of the first link with respect to the vertical axis.
* `θ2`: Angle between the two links.
### Detailed Analysis
* **Link Lengths:** The first link (L1) has a length of 10 units, and the second link (L2) has a length of 7 units.
* **Angles:** The angle θ1 is formed between the first link and the vertical axis. The angle θ2 is formed between the two links.
* **Workspace:** The green shaded area represents the primary workspace, while the yellow shaded area represents the extended workspace.
* **Coordinate Point:** The coordinate point (x, y) represents the position of the free end of the robot arm.
### Key Observations
* The diagram illustrates the kinematic configuration of a two-link robot arm.
* The workspace is determined by the lengths of the links and the range of motion of the joints.
* The coordinate point (x, y) can be calculated using the link lengths and angles.
### Interpretation
The diagram provides a visual representation of a two-link robot arm and its workspace. It demonstrates how the lengths of the links and the angles of the joints determine the position of the free end of the arm. This type of diagram is useful for understanding the kinematics of robot arms and for planning their movements. The workspace visualization helps in determining the reachable area for the robot arm.