## Diagram: Octree Nodes and Linked Chunks of Points
### Overview
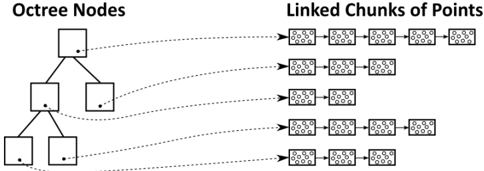
The image illustrates the relationship between octree nodes and linked chunks of points. It shows a hierarchical octree structure on the left, with each node connected to a linked list of point chunks on the right. The diagram visually represents how spatial data is organized and accessed using an octree data structure.
### Components/Axes
* **Title (Left):** Octree Nodes
* **Title (Right):** Linked Chunks of Points
* **Octree Nodes:** A tree structure where each internal node has eight children (not explicitly shown, but implied by the name "octree"). The diagram shows a simplified representation with fewer children per node for clarity. Each node is represented by a rectangle.
* **Linked Chunks of Points:** A series of linked lists. Each node in the linked list contains a "chunk" of points, represented by a rectangle containing several small circles. The arrows indicate the direction of the link.
### Detailed Analysis
* **Octree Structure:** The octree has three levels shown. The root node branches into two nodes on the second level, and one of those nodes branches into two nodes on the third level. Each node in the octree has a small dot inside, presumably representing the center of the spatial region it represents.
* **Linked List Structure:** There are five linked lists of point chunks. Each linked list contains between 3 and 4 chunks of points. Each chunk contains approximately 10-15 points.
* **Connections:** Each octree node is connected to a linked list of point chunks via a dashed line. The top-most octree node is connected to the top-most linked list, and so on.
### Key Observations
* The diagram shows a one-to-one correspondence between octree nodes and linked lists of point chunks.
* The octree structure provides a hierarchical spatial index, while the linked lists provide a way to store and access the actual point data.
### Interpretation
The diagram illustrates a common technique for organizing and accessing spatial data. The octree provides a way to quickly locate points in space, while the linked lists provide a way to store and retrieve the actual point data. This combination allows for efficient spatial queries and data management. The diagram suggests that each octree node is responsible for a specific region of space, and the linked list associated with that node contains all the points within that region.