## Quadruped Robot System and Classification Performance
### Overview
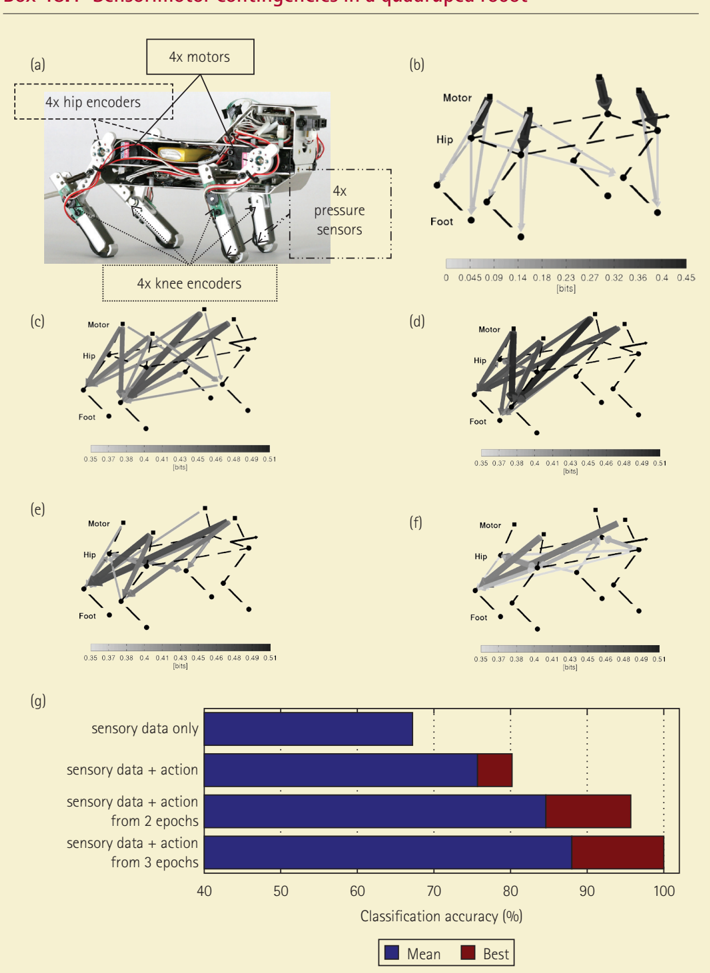
The image presents a technical analysis of a quadruped robot system, combining hardware diagrams, kinematic models, and classification performance metrics. The document is divided into seven sections (a-g), progressing from physical components to data-driven performance analysis.
### Components/Axes
**Hardware Components (a-b):**
- (a) Quadruped robot with:
- 4x motors (labeled)
- 4x hip encoders (dashed box)
- 4x knee encoders (dashed box)
- 4x pressure sensors (dashed box)
- (b) Kinematic diagram showing:
- Motor → Hip → Foot joint chain
- Angle measurements (0.00 to 0.45 bits)
- Color scale: 0.00 (light gray) to 0.45 (dark gray)
**Heatmap Analysis (c-f):**
- Axes:
- X-axis: "bits" (0.35 to 0.51)
- Y-axis: Unlabeled (implied joint positions)
- Color scale: 0.35 (light gray) to 0.51 (dark gray)
- Sections:
- (c) Motor-hip-foot relationships
- (d) Hip-foot pressure distribution
- (e) Motor-hip coordination
- (f) Foot pressure distribution
**Classification Performance (g):**
- Bar chart with:
- X-axis: Classification accuracy (%) (40-100)
- Y-axis: Data input categories:
1. Sensory data only
2. Sensory data + action
3. Sensory data + action from 2 epochs
4. Sensory data + action from 3 epochs
- Legend:
- Blue: Mean accuracy
- Red: Best accuracy
### Detailed Analysis
**Hardware Components:**
- Motor configuration shows centralized control unit with red/white wiring
- Encoders positioned at hip/knee joints for motion tracking
- Pressure sensors embedded in foot structure
**Kinematic Models:**
- (b) Diagram uses black arrows for motor forces, gray for structural connections
- (c-f) Heatmaps show gradient intensities indicating joint coordination patterns
- Darker regions (0.48-0.51 bits) suggest high coordination points
**Classification Performance:**
- Sensory data only: ~65% mean accuracy (blue bar)
- Sensory + action: ~75% mean accuracy (blue bar)
- Sensory + action (2 epochs): ~85% mean accuracy (blue bar)
- Sensory + action (3 epochs): ~95% mean accuracy (blue bar)
- Best accuracy values consistently 5-10% higher than mean across all categories
### Key Observations
1. Hardware complexity increases from (a) to (b) with added kinematic details
2. Heatmaps (c-f) show concentrated dark regions at joint intersections
3. Classification accuracy improves significantly with added temporal action data
4. Best accuracy values suggest optimization potential in data fusion approaches
### Interpretation
The data demonstrates a clear correlation between data complexity and classification performance. The 30% accuracy increase from basic sensory data to 3-epoch action data suggests that temporal context significantly enhances system understanding. The consistent 5-10% gap between mean and best accuracy indicates room for optimization in data processing algorithms. The heatmap patterns imply that joint coordination points are critical for accurate classification, particularly in the hip-foot pressure distribution (d) and motor-hip coordination (e). The hardware design in (a) appears optimized for both mobility (motor placement) and sensory feedback (encoder/sensor distribution).