\n
## Diagram: Adaptive Control Loop with LLM
### Overview
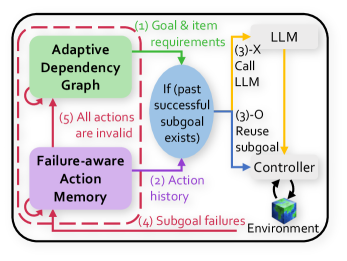
This diagram illustrates an adaptive control loop incorporating a Large Language Model (LLM) for goal-oriented action planning and execution. The system includes components for dependency management, action memory, a controller, and interaction with an environment. The diagram highlights the flow of information and control signals between these components, particularly focusing on how failures are handled and how the LLM is utilized for both initial planning and adaptation.
### Components/Axes
The diagram consists of the following components:
* **Adaptive Dependency Graph:** A green rectangular block.
* **Failure-aware Action Memory:** A purple rectangular block.
* **LLM:** A light gray rectangular block.
* **Controller:** A blue rectangular block.
* **Environment:** A small cube-shaped icon.
* **Decision Node:** An oval shape labeled "If (past successful subgoal exists)".
The diagram also includes labeled arrows indicating the flow of information and control:
* **(1) Goal & item requirements:** Yellow arrow from Adaptive Dependency Graph to LLM.
* **(2) Action history:** Pink arrow from Failure-aware Action Memory to Decision Node.
* **(3)-X Call LLM:** Yellow dashed arrow from LLM to Controller.
* **(3)-O Reuse subgoal:** Yellow arrow from Decision Node to Controller.
* **(4) Subgoal failures:** Red arrow from Environment to Failure-aware Action Memory.
* **(5) All actions are invalid:** Red arrow from Failure-aware Action Memory to Adaptive Dependency Graph.
A dashed red border encompasses the Adaptive Dependency Graph, Failure-aware Action Memory, and Environment, suggesting a closed-loop system.
### Detailed Analysis or Content Details
The diagram depicts a cyclical process:
1. The **Adaptive Dependency Graph** provides **Goal & item requirements (1)** to the **LLM**.
2. The **LLM** generates a plan and sends a **Call LLM (3)-X** signal to the **Controller**.
3. The **Controller** interacts with the **Environment**.
4. If the **Environment** encounters **Subgoal failures (4)**, this information is sent to the **Failure-aware Action Memory**.
5. The **Failure-aware Action Memory** determines if **All actions are invalid (5)** and sends this information back to the **Adaptive Dependency Graph**, triggering a replanning process.
6. Alternatively, if a **past successful subgoal exists**, the **Decision Node** sends a **Reuse subgoal (3)-O** signal to the **Controller**.
7. The **Failure-aware Action Memory** also provides **Action history (2)** to the **Decision Node** to inform the decision of whether to reuse a subgoal.
### Key Observations
* The system is designed to handle failures by incorporating a failure-aware action memory and a mechanism for invalidating actions.
* The LLM is used both for initial planning and potentially for adapting plans based on past successes and failures.
* The dashed red border highlights the closed-loop nature of the system, emphasizing the continuous cycle of planning, execution, and adaptation.
* The use of dashed vs. solid lines for the LLM interaction (3-X vs 3-O) suggests a distinction between initial LLM calls and reuse of existing subgoals.
### Interpretation
This diagram represents a sophisticated control architecture that leverages the capabilities of LLMs for adaptive planning and execution. The system is designed to be robust to failures by incorporating a memory of past actions and a mechanism for invalidating plans when necessary. The LLM acts as a central planning component, but the system also allows for the reuse of successful subgoals, potentially improving efficiency. The inclusion of the Adaptive Dependency Graph suggests that the system can also adapt to changes in the environment or task requirements.
The diagram suggests a shift from traditional, pre-programmed control systems to more flexible and intelligent systems that can learn from experience and adapt to changing conditions. The LLM is not simply a one-time planner but is integrated into a continuous loop of planning, execution, and adaptation. This architecture is particularly well-suited for complex tasks where it is difficult to anticipate all possible scenarios in advance. The system's ability to learn from failures and reuse successful subgoals is crucial for achieving robust and reliable performance.