## Image Grid: Robot Task Execution
### Overview
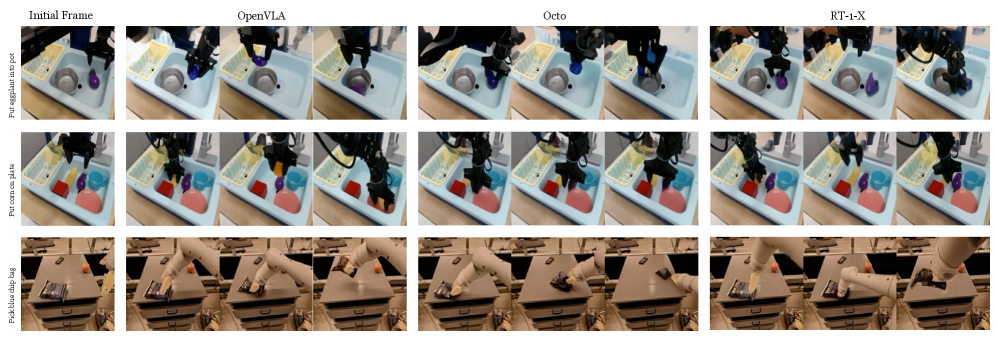
The image presents a grid of photographs depicting a robotic arm performing three different tasks. The tasks are "Put eggplant into pot", "Put corn on plate", and "Pick blue chip bag". Each task is shown across four different robotic systems: "Initial Frame", "OpenVLA", "Octo", and "RT-1-X". The grid format allows for a visual comparison of how each system executes the same task.
### Components/Axes
* **Rows (Tasks):**
* Row 1: "Put eggplant into pot"
* Row 2: "Put corn on plate"
* Row 3: "Pick blue chip bag"
* **Columns (Robotic Systems):**
* Column 1: "Initial Frame" - Shows the starting state of the task.
* Column 2: "OpenVLA" - Shows the robotic arm executing the task using the OpenVLA system.
* Column 3: "Octo" - Shows the robotic arm executing the task using the Octo system.
* Column 4: "RT-1-X" - Shows the robotic arm executing the task using the RT-1-X system.
### Detailed Analysis or ### Content Details
**Row 1: Put eggplant into pot**
* **Initial Frame:** A purple eggplant is visible next to a silver pot inside a light blue sink.
* **OpenVLA:** The robotic arm is shown holding the purple eggplant above the silver pot.
* **Octo:** The robotic arm is shown holding the purple eggplant above the silver pot.
* **RT-1-X:** The robotic arm is shown holding the purple eggplant above the silver pot.
**Row 2: Put corn on plate**
* **Initial Frame:** A yellow corn cob is visible next to a pink plate inside a light blue sink, along with other objects like a red block and a blue cup.
* **OpenVLA:** The robotic arm is shown holding the yellow corn cob above the pink plate.
* **Octo:** The robotic arm is shown holding the yellow corn cob above the pink plate.
* **RT-1-X:** The robotic arm is shown holding the yellow corn cob above the pink plate.
**Row 3: Pick blue chip bag**
* **Initial Frame:** A blue chip bag is visible on a gray surface.
* **OpenVLA:** The robotic arm is shown reaching for the blue chip bag.
* **Octo:** The robotic arm is shown reaching for the blue chip bag.
* **RT-1-X:** The robotic arm is shown reaching for the blue chip bag.
### Key Observations
* The "Initial Frame" column provides a baseline for each task, showing the initial arrangement of objects.
* The "OpenVLA", "Octo", and "RT-1-X" columns demonstrate the robotic arm's actions in executing each task.
* The tasks involve object manipulation, such as picking and placing items.
* The robotic systems appear to be performing similar actions for each task, but there may be subtle differences in their approach or execution.
### Interpretation
The image provides a visual comparison of different robotic systems performing a set of tasks. It highlights the capabilities of each system in terms of object manipulation and task execution. The grid format allows for a direct comparison of the systems' performance, potentially revealing strengths and weaknesses of each approach. The tasks are relatively simple, suggesting that the focus is on evaluating the systems' basic manipulation skills.