## Screenshot: User Query with Embedded Image
### Overview
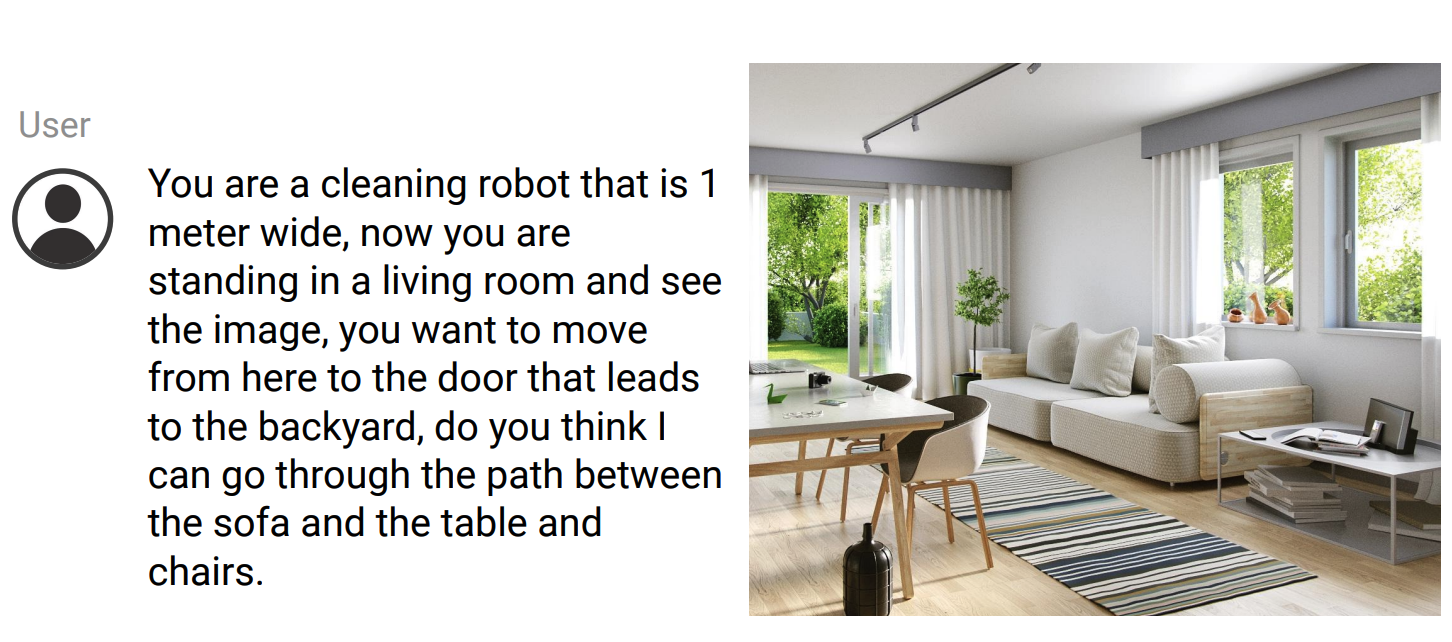
The image is a screenshot of a user interface, likely a chat or forum post. It contains a user's textual query on the left and an embedded photograph of a living room interior on the right. The user is posing a spatial navigation problem from the perspective of a cleaning robot.
### Components/Axes
The image is divided into two primary regions:
1. **Left Panel (User Query):**
* **Header:** The word "User" in light gray text.
* **User Icon:** A generic, circular, dark gray silhouette icon of a person.
* **Text Block:** The user's query in black text on a white background.
2. **Right Panel (Embedded Photograph):**
* **Subject:** A brightly lit, modern living room and dining area.
* **Key Elements:**
* **Flooring:** Light-colored wood laminate or vinyl planks.
* **Rug:** A large, rectangular area rug with horizontal stripes in shades of blue, gray, beige, and white. It is positioned centrally under the coffee table and extends towards the sofa.
* **Sofa:** A light beige or off-white sectional sofa with wooden armrests and multiple cushions. It is placed against the right wall.
* **Dining Set:** A light wood dining table with two visible chairs. The chairs have light wood legs and dark gray or black seats/backs. One chair is tucked under the table, and the other is pulled out slightly.
* **Coffee Table:** A low, white, rectangular coffee table with metal legs, positioned in front of the sofa on the rug. It holds books, a laptop, and other small items.
* **Windows/Doors:** Large sliding glass doors on the left wall, leading to a green backyard. Two additional windows are on the right wall above the sofa. All are dressed with sheer white curtains.
* **Lighting:** A black track lighting fixture is mounted on the ceiling.
* **Decor:** A small potted tree in the corner, decorative items on the windowsill, and a dark vase on the floor near the dining table.
### Detailed Analysis: Transcription of User Query
The text in the left panel reads verbatim:
"User
You are a cleaning robot that is 1 meter wide, now you are standing in a living room and see the image, you want to move from here to the door that leads to the backyard, do you think I can go through the path between the sofa and the table and chairs."
### Key Observations
1. **Spatial Layout:** The primary path from the viewer's perspective (where the robot "stands") to the sliding glass door (the "door that leads to the backyard") is along the left side of the room, past the dining table.
2. **Potential Obstruction:** The critical path segment is the gap between the right side of the dining table/chairs and the left side of the sofa/coffee table. The striped rug defines this central area.
3. **Chair Position:** One dining chair is pulled out from the table, narrowing the passage. Its legs and the table legs create potential snag points.
4. **Scale Reference:** The user provides the robot's width (1 meter). Using the sofa (typically ~0.9-1m deep) and the coffee table (~0.4-0.5m wide) as rough visual guides, the gap between the pulled-out chair and the sofa appears to be in the range of 0.8 to 1.2 meters, but it is not a clear, straight shot.
### Interpretation
The user is presenting a practical robotics navigation challenge. The question requires assessing whether a 1-meter-wide agent can traverse a cluttered domestic environment.
* **What the data suggests:** The photograph provides the necessary visual data to evaluate the path. The key factors are the width of the clear floor space and the presence of low obstacles (chair legs, table legs, rug edges).
* **How elements relate:** The sofa and dining set define the boundaries of the navigable corridor. The rug may affect traction but not width. The pulled-out chair is the most significant variable reducing the effective path width.
* **Analysis of the Path:** While the *absolute* width between the sofa and the *table* might be sufficient, the path is obstructed by the *chair*. The robot would need to navigate around the chair's legs, which requires more than just a 1-meter-wide straight gap; it needs maneuvering space. The tightest point is likely between the chair's back legs and the sofa's edge.
* **Conclusion:** It is **unlikely** the robot can pass *directly* through the path between the sofa and the table/chairs as they are currently configured. The pulled-out chair creates an obstacle. To succeed, the robot would either need to be narrower than 1 meter at that point, have advanced obstacle avoidance to navigate around the chair legs, or the chair would need to be pushed in to widen the clear path. The intended route might require going around the other side of the dining table, which is not visible in the frame.