## Violin Plot: Search Space Size Comparison
### Overview
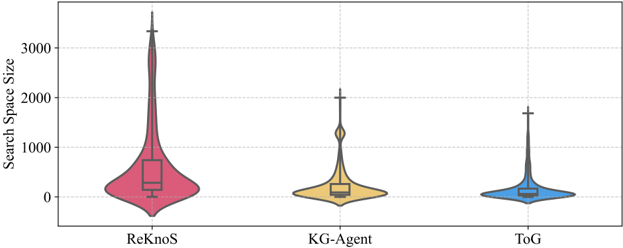
The image is a violin plot comparing the search space size of three different agents: ReKnoS, KG-Agent, and ToG. The plot displays the distribution of search space sizes for each agent, with a box plot overlaid to show the median and interquartile range.
### Components/Axes
* **X-axis:** Agent type (ReKnoS, KG-Agent, ToG)
* **Y-axis:** Search Space Size
* Scale: 0 to 3000, with gridlines at intervals of 1000.
* **Plot Type:** Violin plot with overlaid box plot.
* **Colors:**
* ReKnoS: Red
* KG-Agent: Yellow
* ToG: Blue
### Detailed Analysis
* **ReKnoS (Red):**
* Distribution: Highly skewed, with a long tail extending to larger search space sizes.
* Box Plot:
* Median: Approximately 200
* Interquartile Range (IQR): Approximately 100 to 700
* Maximum value: Approximately 3300
* **KG-Agent (Yellow):**
* Distribution: Less skewed than ReKnoS, but still with a tail extending to larger search space sizes.
* Box Plot:
* Median: Approximately 50
* Interquartile Range (IQR): Approximately 0 to 200
* Maximum value: Approximately 2000
* **ToG (Blue):**
* Distribution: Least skewed of the three, with a more concentrated distribution.
* Box Plot:
* Median: Approximately 50
* Interquartile Range (IQR): Approximately 0 to 150
* Maximum value: Approximately 1800
### Key Observations
* ReKnoS has the largest search space size, with a median significantly higher than the other two agents.
* KG-Agent and ToG have similar median search space sizes, but ToG has a slightly less skewed distribution.
* All three agents have outliers with larger search space sizes, as indicated by the long tails of the violin plots.
### Interpretation
The violin plot suggests that ReKnoS tends to explore a much larger search space compared to KG-Agent and ToG. While KG-Agent and ToG have similar median search space sizes, ToG's distribution is more concentrated, indicating more consistent performance. The long tails of the violin plots suggest that all three agents occasionally encounter scenarios requiring a significantly larger search space. This could be due to the complexity of the problem or the agent's exploration strategy.