\n
## Screenshot: Simulated Environment with Robot
### Overview
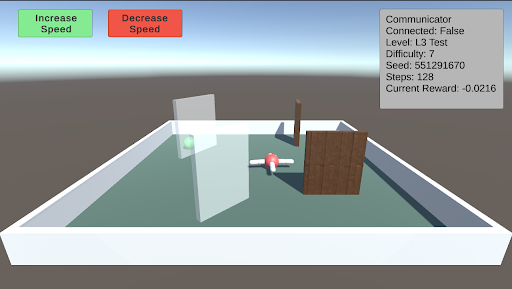
The image is a screenshot of a simulated 3D environment, likely a game or robotics simulation. It features a white, rectangular arena with a small, red and white robot positioned within it. The environment contains several translucent, grey rectangular obstacles and a brown wooden structure. A user interface is present in the top-left and top-right corners, providing controls and status information.
### Components/Axes
The screenshot contains the following UI elements and information:
* **Top-Left:** Two buttons:
* "Increase Speed" (Green)
* "Decrease Speed" (Red)
* **Top-Right:** A text block displaying simulation parameters:
* "Communicator"
* "Connected: False"
* "Level: L3 Test"
* "Difficulty: 7"
* "Seed: 551291670"
* "Steps: 128"
* "Current Reward: -0.0216"
* **Environment:**
* White rectangular arena with a slightly raised edge.
* Translucent grey rectangular obstacles.
* Brown wooden structure.
* Red and white robot.
### Detailed Analysis or Content Details
The simulation parameters provide specific values:
* **Connected:** False
* **Level:** L3 Test
* **Difficulty:** 7
* **Seed:** 551291670 (This is likely a random number used to initialize the simulation)
* **Steps:** 128 (Represents the number of simulation steps taken)
* **Current Reward:** -0.0216 (Indicates the robot's current reward value, which is negative)
The robot is positioned near the center of the arena, between the grey obstacles and the wooden structure. The arena floor appears to be a dark teal color.
### Key Observations
* The "Connected" status is "False", suggesting the simulation is running in a standalone mode.
* The "Current Reward" is negative, indicating the robot is not performing optimally or is being penalized.
* The "Steps" value of 128 suggests the simulation has been running for a moderate amount of time.
* The level is designated as "L3 Test", indicating a testing phase for level 3.
### Interpretation
This screenshot depicts a reinforcement learning or robotics simulation environment. The robot is likely learning to navigate the arena, avoid obstacles, and achieve a positive reward. The negative reward suggests the robot is currently failing to meet the simulation's objectives. The "Increase Speed" and "Decrease Speed" buttons allow a user to influence the robot's movement, potentially for testing or debugging purposes. The seed value ensures reproducibility of the simulation. The level designation and difficulty setting suggest a structured progression of challenges. The overall setup implies a controlled environment for training and evaluating an autonomous agent. The lack of connection suggests the simulation is running locally, without external communication or control.