## Simulation Interface: 3D Physics Test Environment
### Overview
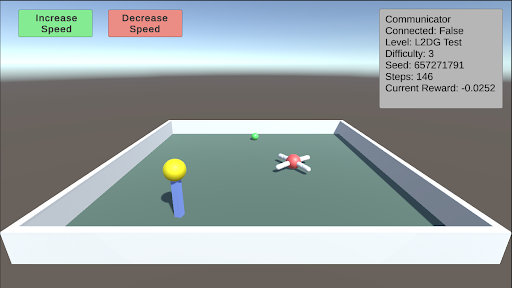
The image depicts a 3D simulation interface with a rectangular container housing physical objects. The interface includes control buttons, status indicators, and a 3D workspace. The simulation appears to be a physics-based test environment with configurable parameters and real-time feedback.
### Components/Axes
1. **Control Panel (Top-Left)**
- Green button: "Increase Speed"
- Red button: "Decrease Speed"
- Position: Top-left corner, adjacent to each other
2. **Status Display (Top-Right)**
- Text box with technical parameters:
- "Communicator Connected: False"
- "Level: L2DG Test"
- "Difficulty: 3"
- "Seed: 657271791"
- "Steps: 146"
- "Current Reward: -0.0252"
- Position: Top-right corner, occupying ~25% of the header area
3. **Simulation Workspace**
- White rectangular container with dark green floor
- Position: Central focus of the interface
- Contents:
- Blue vertical pole with yellow spherical top (left side)
- Red spherical object with three white rod-like extensions (center-right)
- Small green sphere (background, near top-center)
4. **Background**
- Gradient from light blue (top) to dark gray (bottom)
- No additional UI elements visible
### Detailed Analysis
- **Control Panel**: Speed adjustment controls suggest real-time manipulation of simulation dynamics.
- **Status Display**:
- Communicator status indicates potential multi-agent or networked simulation capabilities.
- Seed value (657271791) implies procedural generation for reproducibility.
- Negative reward (-0.0252) suggests performance metric tracking, possibly for reinforcement learning.
- **Simulation Objects**:
- Blue pole/yellow sphere: Likely a manipulable object or reference point.
- Red sphere with white rods: Could represent a molecular structure or mechanical component.
- Green sphere: Small size and position suggest it may be a target or secondary object.
### Key Observations
1. The simulation is in a test state ("L2DG Test") with no active network connection.
2. The negative reward value indicates suboptimal performance in the current configuration.
3. Object placement shows spatial distribution across the workspace, possibly for collision or interaction testing.
4. Difficulty level 3 suggests adjustable complexity in the simulation parameters.
### Interpretation
This interface appears to be a training or testing environment for reinforcement learning agents, likely in robotics or physics simulation. The disconnected communicator status implies local operation, while the seed and step count enable experiment reproducibility. The negative reward metric suggests the system is evaluating performance against a target, possibly requiring optimization through speed adjustments. The molecular-like red object and geometric shapes indicate potential applications in material science or mechanical engineering simulations. The difficulty level and control buttons suggest adjustable parameters for varying test scenarios, allowing researchers to study object interactions under different conditions.