## Line Chart & Trajectory Plots: Point Robot 2D Navigation Performance
### Overview
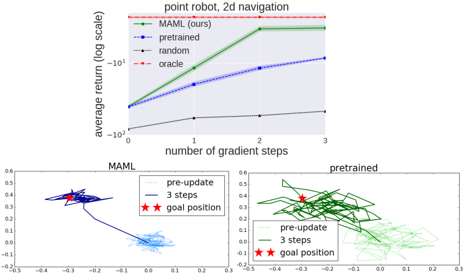
The image presents a line chart illustrating the average return (on a logarithmic scale) versus the number of gradient steps for different learning algorithms in a 2D robot navigation task. Below the chart are two trajectory plots, one for the MAML algorithm and one for a pretrained model, showing robot paths before and after adaptation.
### Components/Axes
* **Title:** "point robot, 2d navigation" (top-center, red text)
* **Y-axis:** "average return (log scale)" (left side, vertical) - Scale ranges from approximately -10<sup>-1</sup> to -10<sup>-0</sup>.
* **X-axis:** "number of gradient steps" (bottom, horizontal) - Scale ranges from 0 to 3.
* **Legend:** Located in the top-right corner. Contains the following algorithms with corresponding colors:
* MAML (ours) - Green
* pretrained - Blue
* random - Gray
* oracle - Purple
* **Trajectory Plots:** Two subplots labeled "MAML" (left) and "pretrained" (right).
* Each plot has axes ranging from approximately -0.25 to 0.6.
* Each plot includes a legend:
* pre-update - Lighter shade
* 3 steps - Darker shade
* Both plots mark the "goal position" with a red star symbol.
### Detailed Analysis or Content Details
**Line Chart:**
* **MAML (Green):** The line starts at approximately -0.1 at 0 gradient steps and increases rapidly, reaching approximately 1.5 at 3 gradient steps. The trend is strongly upward.
* **Pretrained (Blue):** The line starts at approximately -0.1 at 0 gradient steps and increases steadily, reaching approximately 0.5 at 3 gradient steps. The trend is upward, but less steep than MAML.
* **Random (Gray):** The line remains relatively flat, starting at approximately -0.2 and ending at approximately -0.15 at 3 gradient steps. The trend is nearly horizontal.
* **Oracle (Purple):** The line starts at approximately -0.1 at 0 gradient steps and increases, reaching approximately 0.7 at 3 gradient steps. The trend is upward, but less steep than MAML.
**Trajectory Plots:**
* **MAML:** The "pre-update" trajectory (lighter blue) shows a scattered path, while the "3 steps" trajectory (darker blue) shows a more directed path towards the goal position (red star). The initial path is more erratic, and the adapted path is more focused.
* **Pretrained:** The "pre-update" trajectory (lighter green) is also scattered, but appears to have a slightly more directed initial movement than MAML's pre-update path. The "3 steps" trajectory (darker green) shows a more refined path towards the goal position, but still exhibits some meandering.
### Key Observations
* MAML significantly outperforms the other algorithms in terms of average return, especially as the number of gradient steps increases.
* The random algorithm performs poorly, indicating the importance of learning.
* The pretrained model shows improvement with gradient steps, but not to the same extent as MAML.
* The trajectory plots visually demonstrate the adaptation process, with both MAML and the pretrained model showing more directed paths after adaptation.
* MAML's initial pre-update trajectory is more scattered than the pretrained model's, suggesting it requires more adaptation.
### Interpretation
The data suggests that MAML is a highly effective algorithm for adapting a robot to a 2D navigation task. The rapid increase in average return with gradient steps indicates fast learning and efficient adaptation. The trajectory plots corroborate this, showing a clear improvement in path planning after adaptation. The pretrained model also demonstrates learning, but its performance is lower than MAML's, suggesting that MAML's meta-learning approach is more beneficial in this scenario. The poor performance of the random algorithm highlights the necessity of a learning-based approach. The "oracle" line suggests an upper bound on performance, which MAML is approaching.
The difference in pre-update trajectories between MAML and the pretrained model could indicate that MAML starts with a less informed initial policy, requiring more adaptation to achieve optimal performance. However, its ability to quickly adapt and surpass the pretrained model demonstrates its superior learning capabilities. The goal position being reached by both adapted models indicates successful navigation.