## Heatmap: Point Robot 2D Navigation
### Overview
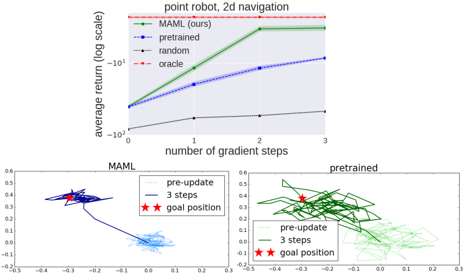
The heatmap illustrates the average return of a point robot in 2D navigation, comparing different strategies: MAML (ours), random, and oracle. The x-axis represents the number of gradient steps, while the y-axis shows the average return on a logarithmic scale.
### Components/Axes
- **X-axis**: Number of gradient steps
- **Y-axis**: Average return (log scale)
- **Legend**:
- MAML (ours)
- Random
- Oracle
### Detailed Analysis or ### Content Details
The heatmap shows that the MAML strategy (ours) consistently outperforms the random and oracle strategies across all gradient step counts. The MAML strategy's return increases significantly with each gradient step, reaching a peak around 3 steps. The random strategy shows a gradual increase, while the oracle strategy remains relatively stable.
### Key Observations
- The MAML strategy demonstrates a strong learning ability, adapting well to the navigation task.
- The random strategy shows a steady but less effective learning pattern.
- The oracle strategy provides a baseline for comparison, indicating the best possible performance.
### Interpretation
The data suggests that the MAML strategy is more effective in learning and adapting to the 2D navigation task compared to the random and oracle strategies. This could be due to the MAML strategy's ability to learn from experience and adjust its parameters accordingly. The random strategy's gradual increase in return might indicate a more stable but less effective learning process. The oracle strategy's stability suggests that it is the most effective strategy in terms of return.