## Line Chart: point robot, 2d navigation
### Overview
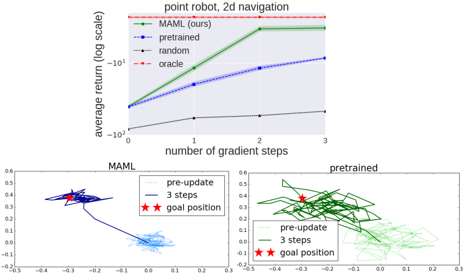
The image contains a line chart comparing navigation performance metrics across different training approaches for a 2D point robot. Below the main chart are two trajectory diagrams illustrating path behaviors for two specific methods.
### Components/Axes
**Main Chart:**
- **X-axis**: "number of gradient steps" (0 to 3)
- **Y-axis**: "average return (log scale)" (-10¹ to -10⁻²)
- **Legend**:
- MAML (ours): solid green line
- pretrained: dashed blue line
- random: dotted black line
- oracle: dashed red line
**Diagrams:**
- Left: "MAML" with blue trajectory paths
- Right: "pretrained" with green trajectory paths
- Both diagrams include:
- Red star markers labeled "goal position"
- Blue/green lines labeled "pre-update" and "3 steps"
### Detailed Analysis
**Main Chart Trends:**
1. **MAML (ours)**: Starts at ~-10¹.⁵, increases steadily to ~-10⁰.⁵ by step 3
2. **pretrained**: Begins at ~-10², rises to ~-10¹.⁵ by step 3
3. **random**: Remains flat at ~-10¹.⁸ throughout
4. **oracle**: Maintains constant ~-10⁰.⁵ performance
**Diagram Details:**
- **MAML Diagram**:
- Pre-update path: Single blue line from origin to goal
- 3 steps: Complex looping pattern around goal
- Goal position: Red star at (-0.4, 0.3)
- **pretrained Diagram**:
- Pre-update path: Dense cluster of green lines near origin
- 3 steps: Scattered trajectories with some reaching goal
- Goal position: Red star at (-0.4, 0.3)
### Key Observations
1. MAML performance improves dramatically with gradient steps, approaching oracle performance
2. pretrained method shows moderate improvement but remains below MAML
3. Random baseline remains consistently poor
4. MAML trajectories show more efficient goal approach after updates
5. pretrained trajectories demonstrate greater variability in path planning
### Interpretation
The data demonstrates that MAML (ours) significantly outperforms other methods in 2D navigation tasks, with performance improving substantially through gradient updates. The trajectory diagrams reveal that MAML's path planning becomes more efficient after updates, while pretrained methods show less structured improvement. The oracle represents ideal performance, suggesting MAML has substantial room for improvement but already surpasses conventional approaches. The random baseline's flat performance confirms the necessity of structured training for navigation tasks.