## Diagram: Task Decomposition for "move-block"
### Overview
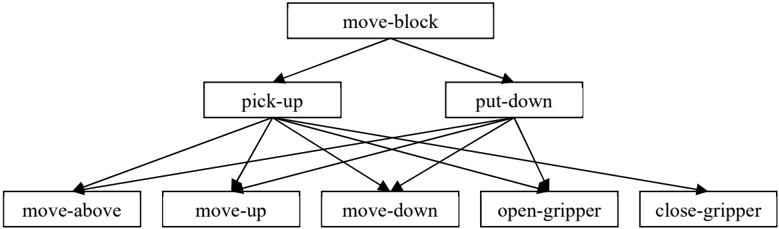
The image is a hierarchical diagram illustrating the decomposition of the "move-block" task into sub-tasks. The diagram shows how "move-block" is broken down into "pick-up" and "put-down", and how these are further decomposed into lower-level actions like "move-above", "move-up", "move-down", "open-gripper", and "close-gripper".
### Components/Axes
* **Nodes:** The diagram consists of rectangular nodes representing tasks or actions. Each node contains a text label describing the task.
* **Edges:** Directed edges (arrows) connect the nodes, indicating the flow of control or dependency between tasks. The arrows point from a higher-level task to its sub-tasks.
* **Hierarchy:** The diagram has a hierarchical structure, with the main task "move-block" at the top and the more granular actions at the bottom.
### Detailed Analysis
The diagram can be broken down into the following levels:
1. **Top Level:**
* Node: "move-block" (at the top center)
2. **Second Level:**
* Node: "pick-up" (left of center)
* Node: "put-down" (right of center)
* Edges: Two arrows point from "move-block" to "pick-up" and "put-down", respectively.
3. **Third Level:**
* Node: "move-above" (far left)
* Node: "move-up" (left of center)
* Node: "move-down" (center)
* Node: "open-gripper" (right of center)
* Node: "close-gripper" (far right)
* Edges: Arrows point from "pick-up" to each of the five nodes in the third level. Arrows also point from "put-down" to each of the five nodes in the third level.
The connections are as follows:
* "pick-up" connects to "move-above", "move-up", "move-down", "open-gripper", and "close-gripper".
* "put-down" connects to "move-above", "move-up", "move-down", "open-gripper", and "close-gripper".
### Key Observations
* The "move-block" task is decomposed into two primary sub-tasks: "pick-up" and "put-down".
* Both "pick-up" and "put-down" share the same set of lower-level actions: "move-above", "move-up", "move-down", "open-gripper", and "close-gripper". This suggests that these actions are necessary for both picking up and putting down a block.
* The diagram does not specify the order or conditions under which these lower-level actions are performed.
### Interpretation
The diagram represents a task decomposition for a robot or automated system designed to move blocks. It shows the hierarchical relationship between the high-level task ("move-block") and the lower-level actions required to accomplish it. The fact that both "pick-up" and "put-down" rely on the same set of actions suggests a modular design where these actions can be reused in different contexts. The diagram provides a high-level overview of the task but lacks details about the specific algorithms or control strategies used to execute each action.