\n
## Diagram: Hierarchical Task Network for Block Moving
### Overview
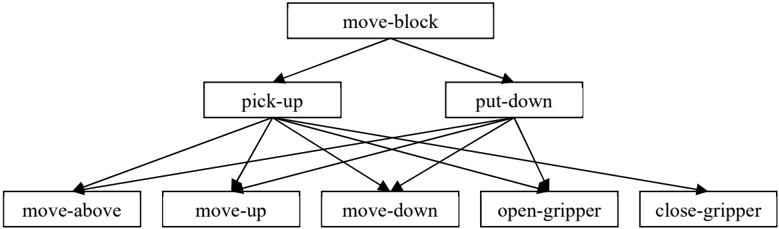
The image depicts a hierarchical task network (HTN) diagram illustrating the decomposition of the task "move-block" into a series of sub-tasks. The diagram uses boxes to represent tasks and arrows to indicate dependencies and decomposition relationships. It shows a top-down breakdown of the main task into smaller, more manageable actions.
### Components/Axes
The diagram consists of the following components:
* **Root Task:** "move-block" - positioned at the top-center.
* **Level 1 Tasks:** "pick-up" and "put-down" - positioned below "move-block".
* **Level 2 Tasks:** "move-above", "move-up", "move-down", "open-gripper", and "close-gripper" - positioned at the bottom.
* **Arrows:** Indicate the decomposition of tasks. Arrows point from a parent task to its child tasks.
### Detailed Analysis or Content Details
The diagram shows the following task decomposition:
1. **move-block** decomposes into **pick-up** and **put-down**.
2. **pick-up** decomposes into **move-above**, **move-up**, and **move-down**.
3. **put-down** decomposes into **open-gripper** and **close-gripper**.
4. There are cross-connections:
* **move-above** connects to both **open-gripper** and **close-gripper**.
* **move-up** connects to both **open-gripper** and **close-gripper**.
* **move-down** connects to both **open-gripper** and **close-gripper**.
### Key Observations
The diagram highlights that moving a block involves both picking it up and putting it down. The pick-up action requires a combination of movements (above, up, down), while the put-down action requires controlling the gripper (opening and closing). The cross-connections suggest that the gripper action is required during each of the movement actions.
### Interpretation
This diagram represents a simplified planning structure for a robotic manipulation task. It demonstrates how a complex task like "move-block" can be broken down into a sequence of primitive actions. The HTN approach is useful for representing tasks with well-defined decomposition rules. The cross-connections between movement tasks and gripper actions indicate that these actions are interleaved during the execution of the plan. This type of diagram is commonly used in AI planning and robotics to represent task hierarchies and generate executable plans. The diagram suggests a procedural approach to block manipulation, where the robot first picks up the block using a sequence of movements and then puts it down by controlling the gripper.