## Hierarchical Task Decomposition Diagram: move-block
### Overview
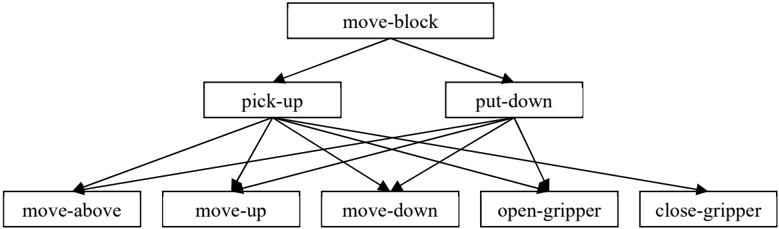
The image displays a hierarchical tree diagram illustrating the decomposition of a high-level robotic manipulation task, "move-block," into its constituent subtasks and primitive actions. The diagram uses a top-down structure with rectangular nodes connected by directional arrows, indicating a "consists of" or "is performed by" relationship.
### Components/Axes
The diagram is structured into three distinct levels:
1. **Top Level (Root Node):** A single node labeled `move-block`.
2. **Intermediate Level:** Two nodes branching from the root: `pick-up` and `put-down`.
3. **Base Level (Primitive Actions):** Five nodes that serve as the fundamental building blocks for the intermediate tasks: `move-above`, `move-up`, `move-down`, `open-gripper`, and `close-gripper`.
**Spatial Grounding:** The root node is centered at the top. The two intermediate nodes are positioned below it, with `pick-up` on the left and `put-down` on the right. The five base-level nodes are arranged in a horizontal row at the bottom of the diagram.
### Detailed Analysis
The diagram defines the following relationships through directed arrows:
* The high-level task `move-block` is decomposed into two primary subtasks:
* `pick-up`
* `put-down`
* The subtask `pick-up` is further decomposed into a sequence or set of the following primitive actions (arrows point from `pick-up` to each of these):
* `move-above`
* `move-down`
* `close-gripper`
* `move-up`
* The subtask `put-down` is decomposed into a sequence or set of the following primitive actions (arrows point from `put-down` to each of these):
* `move-above`
* `move-down`
* `open-gripper`
* `move-up`
**Notable Connection:** The primitive actions `move-above`, `move-down`, and `move-up` are shared components used by both the `pick-up` and `put-down` subtasks. The actions `close-gripper` and `open-gripper` are specific to `pick-up` and `put-down`, respectively.
### Key Observations
1. **Symmetrical Structure:** The decomposition of `pick-up` and `put-down` is nearly symmetrical, differing only in the gripper command (`close-gripper` vs. `open-gripper`).
2. **Shared Primitives:** Three of the five base-level actions (`move-above`, `move-down`, `move-up`) are common to both major subtasks, indicating a reusable set of motion primitives.
3. **Logical Sequence Implication:** While the diagram is a static hierarchy, the arrangement of arrows from a parent to multiple children suggests that the child actions are required to perform the parent task. The typical execution order for a pick-and-place operation would likely follow a sequence like: `move-above` -> `move-down` -> `close-gripper` (for pick-up) / `open-gripper` (for put-down) -> `move-up`.
### Interpretation
This diagram is a formal representation of a **task network** or **action hierarchy**, commonly used in robotics, AI planning, and systems engineering. It explicitly defines the precondition and effect structure of a "pick-and-place" operation.
* **What it demonstrates:** It breaks down an abstract command ("move a block") into a concrete, executable plan composed of sensorimotor primitives. This is essential for translating high-level goals into low-level controller commands for a robotic arm.
* **Relationships:** The hierarchy shows that complex behaviors are built from simpler, reusable modules. The `move-block` task is not a single action but a coordinated sequence of subtasks, which themselves are sequences of atomic actions.
* **Underlying Logic:** The structure implies a state machine. For example, `pick-up` likely requires the gripper to be `open` initially (a precondition) and results in the gripper being `closed` on the block (an effect). `put-down` reverses this. The shared motion primitives (`move-*`) handle the spatial positioning relative to the block and target location.
* **Utility:** This type of diagram is crucial for **planning algorithms** (like Hierarchical Task Network planning) and for **specifying robotic control software** in a modular, maintainable way. It clearly separates the "what" (the task) from the "how" (the primitive actions).