## Flowchart: Block Movement Process
### Overview
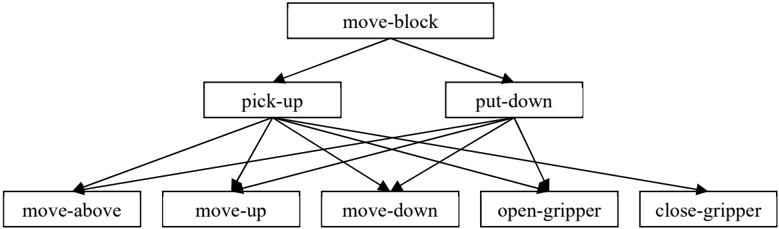
The image depicts a hierarchical flowchart illustrating a block movement process. It consists of a root node ("move-block") branching into two primary actions ("pick-up" and "put-down"), each of which further subdivides into specific sub-actions. Arrows indicate directional flow between components.
### Components/Axes
- **Root Node**: "move-block" (topmost position)
- **First-Level Branches**:
- "pick-up" (left branch from root)
- "put-down" (right branch from root)
- **Second-Level Sub-Actions**:
- Under "pick-up":
- "move-above"
- "move-up"
- "move-down"
- Under "put-down":
- "open-gripper"
- "close-gripper"
- **Connectors**: Black arrows showing process flow between nodes
### Detailed Analysis
1. **Root Node ("move-block")**:
- Positioned at the top center
- Directly connects to both "pick-up" and "put-down" nodes
2. **"pick-up" Branch**:
- Located left of center, directly below root
- Connects to three sub-actions:
- "move-above" (top-left)
- "move-up" (center-left)
- "move-down" (bottom-left)
3. **"put-down" Branch**:
- Located right of center, directly below root
- Connects to two sub-actions:
- "open-gripper" (center-right)
- "close-gripper" (far-right)
4. **Arrow Connections**:
- All arrows are black and bidirectional where applicable
- "move-down" node has dual arrows pointing to both "open-gripper" and "close-gripper"
- "close-gripper" node has a single arrow pointing to "move-down"
### Key Observations
- The process begins with a root action ("move-block") that splits into two parallel paths
- "pick-up" actions focus on positional adjustments ("move-above"/"move-up"/"move-down")
- "put-down" actions involve gripper manipulation ("open"/"close")
- The "move-down" node serves as a convergence point for both gripper actions
- No numerical data or quantitative values are present
### Interpretation
This flowchart represents a robotic or automated system's decision tree for block manipulation. The process flow suggests:
1. A block movement operation ("move-block") requires either picking up or putting down the block
2. Picking up involves spatial adjustments before gripper engagement
3. Putting down requires gripper manipulation followed by positional adjustments
4. The bidirectional connection between "move-down" and gripper actions implies iterative positioning during the put-down phase
5. The absence of termination nodes suggests this is a cyclical process or part of a larger system
The diagram emphasizes mechanical coordination between movement and gripper operations, with "move-down" acting as a critical junction for transitioning between gripper states.