## Diagram: Adaptive Dependency Graph with Failure-Aware Action Memory and LLM Interaction
### Overview
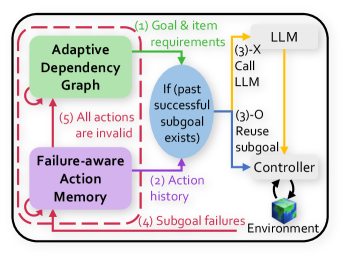
The image presents a diagram illustrating an adaptive dependency graph system that incorporates failure-aware action memory and interacts with a Large Language Model (LLM). The system appears to be designed for goal-oriented tasks within an environment, with mechanisms for adapting to failures and reusing successful subgoals.
### Components/Axes
The diagram consists of the following key components:
* **Adaptive Dependency Graph (Top-Left, Green):** This component likely represents a dynamic structure that models dependencies between actions or subgoals.
* **Failure-aware Action Memory (Bottom-Left, Purple):** This component stores information about past actions and their outcomes, enabling the system to learn from failures.
* **LLM (Top-Right, Gray):** A Large Language Model, used for generating or selecting actions.
* **Controller (Right, Blue):** This component manages the execution of actions and interacts with the environment.
* **Environment (Bottom-Right, Green/Blue):** The external environment in which the system operates.
* **Conditional Check (Center, Blue):** A check for past successful subgoals.
The diagram also includes labeled arrows indicating the flow of information:
* **(1) Goal & item requirements (Top, Green):** Input to the Adaptive Dependency Graph.
* **(2) Action history (Bottom, Purple):** Input to the Failure-aware Action Memory.
* **(3)-X Call LLM (Top-Right, Yellow):** Interaction with the LLM.
* **(3)-O Reuse subgoal (Right, Yellow):** Reuse of a subgoal.
* **(4) Subgoal failures (Bottom, Purple):** Feedback from the environment to the Failure-aware Action Memory.
* **(5) All actions are invalid (Left, Green):** Feedback from the Failure-aware Action Memory to the Adaptive Dependency Graph.
### Detailed Analysis
* **Adaptive Dependency Graph:** Receives "Goal & item requirements" as input. It likely uses this information to construct or update its dependency graph.
* **Failure-aware Action Memory:** Receives "Action history" and "Subgoal failures" as input. This suggests it learns from past experiences, adapting its behavior based on failures.
* **LLM:** Interacts with the Controller via "Call LLM" and "Reuse subgoal" pathways. The LLM likely provides suggestions or actions to the Controller.
* **Controller:** Interacts with the Environment, executing actions and receiving feedback. It also interacts with the LLM and the "Reuse subgoal" pathway.
* **Conditional Check:** The "If (past successful subgoal exists)" component acts as a gate, determining whether a previously successful subgoal can be reused.
### Key Observations
* The system is designed to adapt to failures and reuse successful subgoals.
* The LLM plays a role in generating or selecting actions.
* The Adaptive Dependency Graph and Failure-aware Action Memory are key components for learning and adaptation.
### Interpretation
The diagram illustrates a sophisticated system for goal-oriented tasks that leverages an adaptive dependency graph, failure-aware action memory, and a large language model. The system's ability to learn from failures and reuse successful subgoals suggests a robust and efficient approach to problem-solving in dynamic environments. The interaction with the LLM indicates the potential for leveraging the model's knowledge and reasoning capabilities to improve performance. The system is designed to dynamically adjust its strategy based on past performance and environmental feedback.