## Flowchart: Hierarchical Reinforcement Learning System Architecture
### Overview
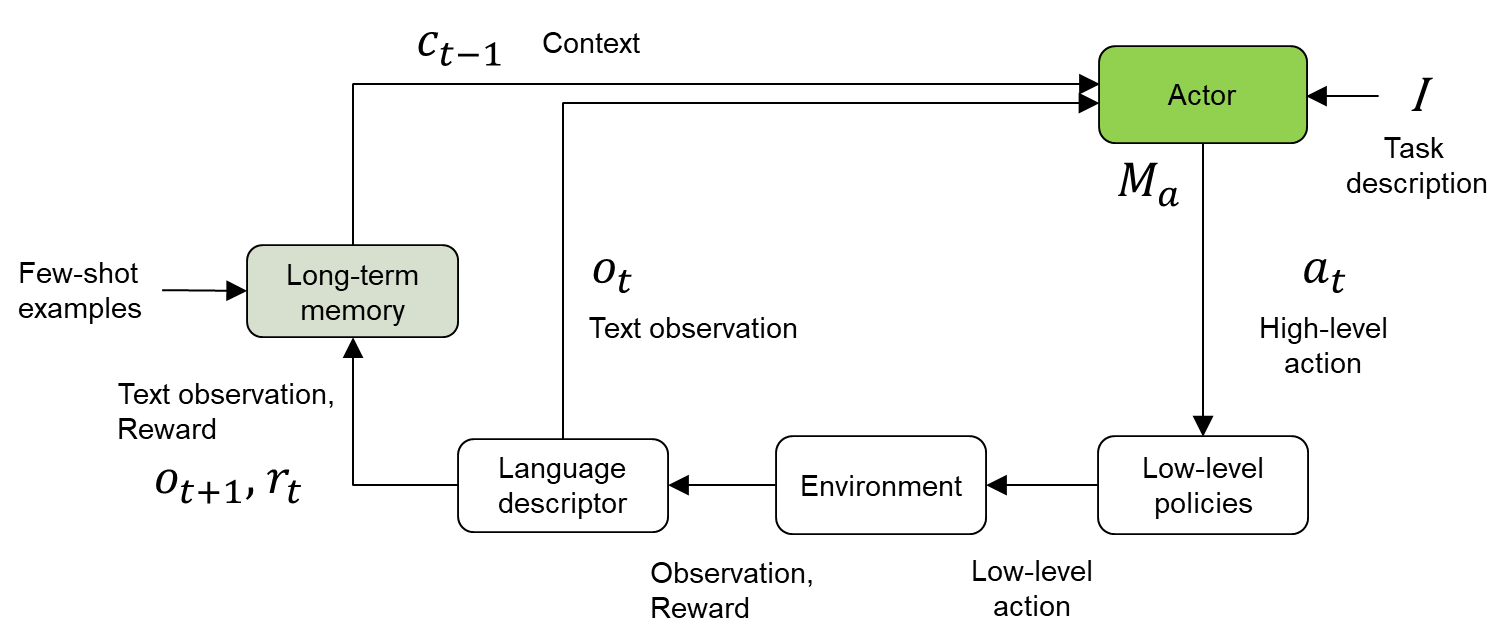
The diagram illustrates a hierarchical reinforcement learning system where context, memory, and environmental interactions drive decision-making. Key components include long-term memory, language processing, environmental feedback, and policy execution layers. The system emphasizes integration of high-level task descriptions with low-level action execution through an "Actor" component.
### Components/Axes
1. **Input Streams**:
- `C_{t-1}`: Context (previous state)
- Few-shot examples: Training data for memory initialization
2. **Memory System**:
- Long-term memory: Stores contextual knowledge and past experiences
3. **Processing Modules**:
- Language descriptor: Converts observations into structured text
- Environment: Simulates real-world interactions
- Low-level policies: Translates high-level actions into executable steps
4. **Control Flow**:
- Actor: Central decision-maker integrating task descriptions and memory
- Feedback loops: Between environment observations and memory updates
### Detailed Analysis
- **Context Flow**:
- `C_{t-1}` (context) and few-shot examples → Long-term memory
- Long-term memory + Text observation (`O_t`) → Language descriptor
- **Environment Interaction**:
- Language descriptor output → Environment
- Environment provides: Observation (`O_{t+1}`), Reward (`R_t`)
- **Policy Execution**:
- Low-level policies → Actor (high-level action `A_t`)
- Actor receives: Task description (`I`), Memory (`M_a`)
- **Temporal Dynamics**:
- Time steps denoted by subscripts (`t`, `t+1`)
- Memory (`M_a`) persists across iterations
### Key Observations
1. **Hierarchical Structure**:
- Clear separation between high-level task description (`I`) and low-level policy execution
2. **Memory Integration**:
- Long-term memory acts as persistent knowledge base influencing all decisions
3. **Feedback Loops**:
- Environment observations (`O_{t+1}`) and rewards (`R_t`) continuously update the system
4. **Actor-Critic Architecture**:
- Actor handles high-level decisions while low-level policies manage execution details
### Interpretation
This architecture demonstrates a sophisticated RL system designed for complex tasks requiring:
1. **Contextual Awareness**: Through persistent memory (`M_a`) and historical context (`C_{t-1}`)
2. **Language Grounding**: Via the language descriptor module converting raw observations into structured text
3. **Multi-timescale Learning**: Combining immediate rewards (`R_t`) with long-term memory retention
4. **Modular Design**: Separation of concern between task description, policy execution, and environmental interaction
The system appears optimized for tasks requiring both strategic planning (high-level actions) and precise execution (low-level policies), with continuous learning through environmental feedback. The bidirectional flow between environment and memory suggests adaptive capabilities that could handle non-stationary environments or evolving task requirements.