## Diagram: Hybrid Evolutionary System Architecture
### Overview
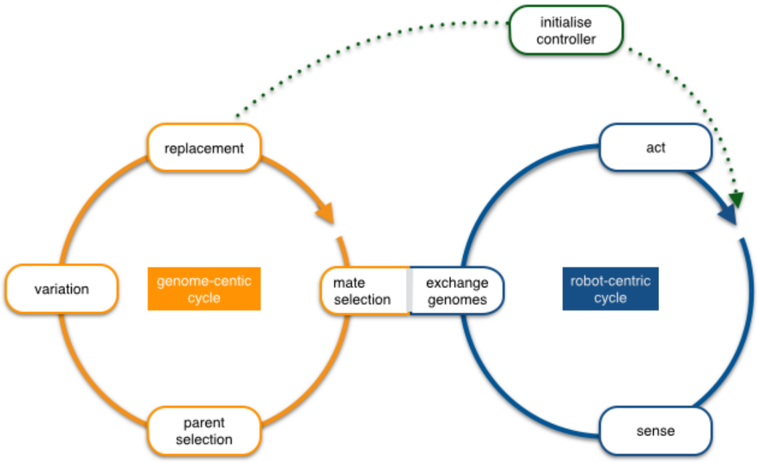
The diagram illustrates a hybrid system integrating biological evolution (genome-centric cycle) and robotic control (robot-centric cycle), mediated by a central controller. Two interconnected cycles are depicted:
1. **Genome-Centric Cycle** (orange): Focuses on genetic variation, parent selection, and replacement.
2. **Robot-Centric Cycle** (blue): Focuses on sensing, acting, and genome exchange.
A green-dotted "initialise controller" connects both cycles, enabling cross-cycle interaction.
### Components/Axes
- **Genome-Centric Cycle (Left, Orange)**:
- **Nodes**:
- `variation` (top-left)
- `parent selection` (bottom-left)
- `replacement` (top-right)
- **Flow**:
- `variation` → `parent selection` → `replacement` (clockwise loop).
- **Robot-Centric Cycle (Right, Blue)**:
- **Nodes**:
- `sense` (bottom-right)
- `act` (top-right)
- `exchange genomes` (center-right)
- **Flow**:
- `sense` → `act` → `exchange genomes` (clockwise loop).
- **Controller (Top, Green Dotted Lines)**:
- Connects to both cycles via dotted lines labeled `initialise controller`.
- **Cross-Cycle Arrows**:
- `mate selection` (orange-to-blue transition).
- `exchange genomes` (blue-to-orange transition).
### Detailed Analysis
- **Genome-Centric Cycle**:
- `variation` generates diversity.
- `parent selection` chooses optimal candidates.
- `replacement` updates the population.
- **Robot-Centric Cycle**:
- `sense` gathers environmental data.
- `act` executes actions based on sensory input.
- `exchange genomes` shares genetic material with the genome-centric cycle.
- **Controller**:
- Initializes both cycles and enables bidirectional communication via `mate selection` and `exchange genomes`.
### Key Observations
1. **Interconnectedness**: The cycles are not isolated; the controller and cross-cycle arrows (`mate selection`, `exchange genomes`) create feedback loops.
2. **Color Coding**:
- Orange (genome-centric) and blue (robot-centric) cycles are visually distinct.
- Green dotted lines for the controller emphasize its supervisory role.
3. **Flow Direction**:
- Both cycles operate in clockwise loops, but cross-cycle interactions introduce non-linear dynamics.
### Interpretation
This diagram represents a **hybrid evolutionary-robotics framework** where biological and artificial systems co-evolve. The genome-centric cycle mimics natural selection, while the robot-centric cycle simulates adaptive behavior. The controller acts as a bridge, allowing robots to influence genetic evolution (via `exchange genomes`) and vice versa (via `mate selection`). This suggests applications in evolutionary robotics, where robots optimize their behavior through genetic algorithms, or in bio-inspired AI systems that blend biological and computational principles.
**Notable Patterns**:
- The absence of explicit numerical data implies a conceptual model rather than empirical results.
- The bidirectional flow between cycles highlights the system’s adaptability and self-organization.