## Image Comparison: Ground-Truth vs. Generated Images
### Overview
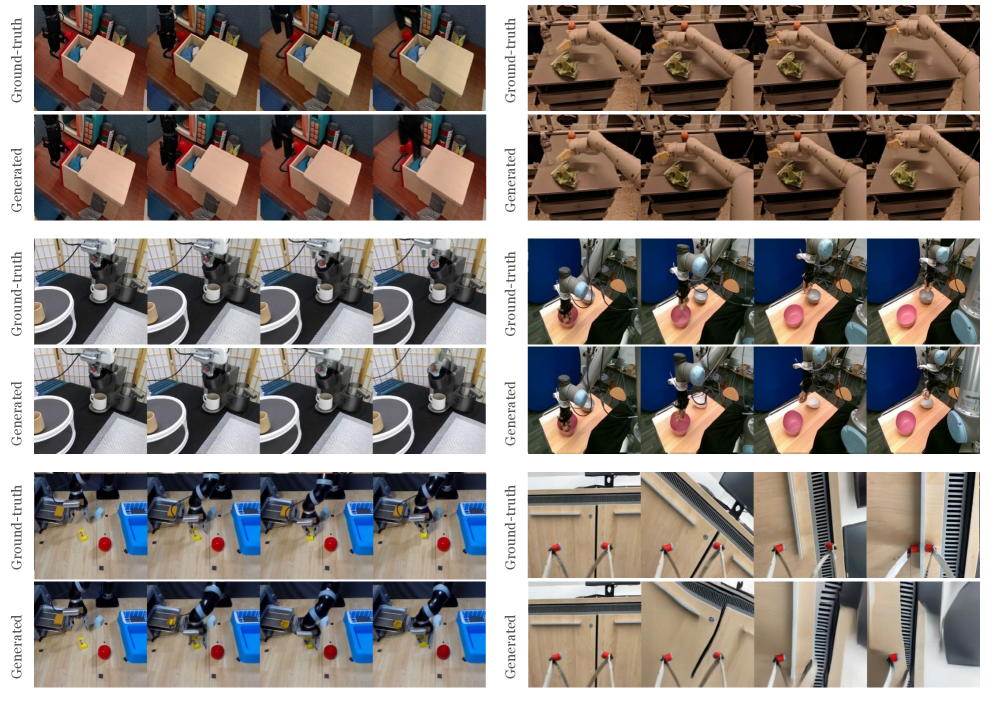
The image presents a series of visual comparisons between "Ground-truth" images and "Generated" images. Each comparison consists of two rows, with the top row showing the ground-truth and the bottom row showing the corresponding generated image. The image is divided into six distinct columns, each depicting a different scene or task.
### Components/Axes
* **Labels:**
* "Ground-truth": Indicates the real or reference image.
* "Generated": Indicates the image produced by a model or algorithm.
* **Scenes/Tasks (Columns):**
* Column 1: A wooden box with an open drawer.
* Column 2: A robotic arm manipulating a green object (likely lettuce) on a metallic surface.
* Column 3: A robotic arm interacting with a coffee maker, a cup, and a table setting.
* Column 4: A robotic arm interacting with a bottle and a bowl.
* Column 5: A robotic arm placing objects into a blue bin.
* Column 6: A close-up of a cabinet or furniture detail.
### Detailed Analysis or Content Details
**Column 1: Wooden Box**
* **Ground-truth:** Four images showing a wooden box with an open drawer in slightly different perspectives. The box contains items inside the drawer.
* **Generated:** Four images showing a similar wooden box, but the texture and lighting appear slightly different. The contents of the drawer are less defined.
**Column 2: Robotic Arm and Lettuce**
* **Ground-truth:** Four images showing a robotic arm holding and manipulating a piece of lettuce on a metallic surface.
* **Generated:** Four images showing a similar robotic arm and lettuce, but the lettuce appears less detailed and the lighting is slightly different.
**Column 3: Robotic Arm and Coffee Maker**
* **Ground-truth:** Four images showing a robotic arm interacting with a coffee maker, a cup, and a table setting. The scene includes a white table and a Japanese-style screen in the background.
* **Generated:** Four images showing a similar scene, but the details of the coffee maker and cup are less sharp.
**Column 4: Robotic Arm, Bottle, and Bowl**
* **Ground-truth:** Four images showing a robotic arm interacting with a bottle and a bowl on a wooden surface. A blue background is visible.
* **Generated:** Four images showing a similar scene, but the colors and textures appear slightly different.
**Column 5: Robotic Arm and Blue Bin**
* **Ground-truth:** Four images showing a robotic arm placing objects (a yellow block and a red sphere) into a blue bin on a wooden floor.
* **Generated:** Four images showing a similar scene, but the details of the objects and the bin are less sharp.
**Column 6: Cabinet Detail**
* **Ground-truth:** Four close-up images showing a cabinet or furniture detail with red pegs or fasteners.
* **Generated:** Four images showing a similar detail, but the textures and lighting appear slightly different.
### Key Observations
* The generated images generally capture the overall scene and objects present in the ground-truth images.
* The generated images often lack the fine details and realistic textures present in the ground-truth images.
* Lighting and color accuracy vary between the ground-truth and generated images.
### Interpretation
The image demonstrates a comparison between real-world scenes (ground-truth) and images generated by a model or algorithm. The goal is likely to assess the quality and realism of the generated images. The results suggest that while the model can reproduce the general layout and objects in the scenes, it struggles to capture the fine details and realistic textures of the real world. This type of comparison is crucial for evaluating and improving the performance of image generation models in robotics and computer vision applications.