## Screenshot: Simulation Interface
### Overview
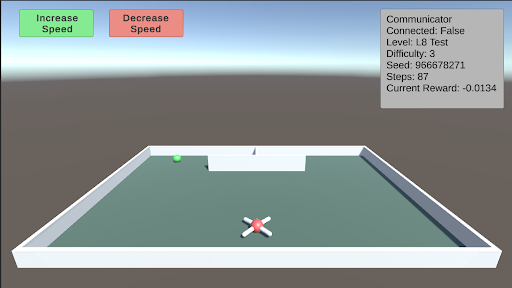
The image depicts a 3D-rendered simulation interface with a rectangular arena, control buttons, and a status panel. The scene includes a central crosshair, a green ball, and a white barrier. Text elements provide simulation parameters and status information.
### Components/Axes
1. **Top-Left Corner**:
- Green button labeled "Increase Speed"
- Red button labeled "Decrease Speed"
2. **Top-Right Corner**:
- Gray status panel with the following text:
- "Communicator Connected: False"
- "Level: L8 Test"
- "Difficulty: 3"
- "Seed: 966678271"
- "Steps: 87"
- "Current Reward: -0.0134"
3. **Main Arena**:
- Rectangular enclosure with white walls and a green floor
- Central red-and-white crosshair (X-shaped)
- Green ball positioned in the top-left quadrant
- White barrier structure near the top-center
### Detailed Analysis
- **Buttons**: Color-coded controls for adjusting simulation speed (green = increase, red = decrease).
- **Status Panel**:
- Communicator status indicates no external connection.
- Level "L8 Test" suggests a test environment for level 8.
- Difficulty 3 implies a moderate challenge setting.
- Seed value (966678271) enables reproducibility of the simulation.
- Steps (87) and Current Reward (-0.0134) track simulation progress and performance metrics.
- **Arena Elements**:
- Crosshair likely represents the player's viewpoint or target.
- Green ball may be an interactive object or goal.
- White barrier could act as an obstacle or boundary.
### Key Observations
- The negative reward (-0.0134) suggests a penalty or suboptimal state in the simulation.
- The seed value is a 9-digit integer, typical for procedural generation in simulations.
- The communicator's "False" status implies the simulation is running locally or in offline mode.
- The barrier's placement near the top-center creates a spatial constraint in the arena.
### Interpretation
This interface appears to be part of a reinforcement learning or robotics simulation environment. The parameters (level, difficulty, seed) and metrics (steps, reward) indicate a focus on training or testing autonomous agents. The disconnected communicator suggests local operation, while the negative reward highlights a need for improvement in the agent's performance. The crosshair and ball positioning imply a task involving navigation or object interaction within the arena. The seed value ensures reproducibility, critical for debugging or sharing experimental results.