## Grid of Robotics Environment Visualizations
### Overview
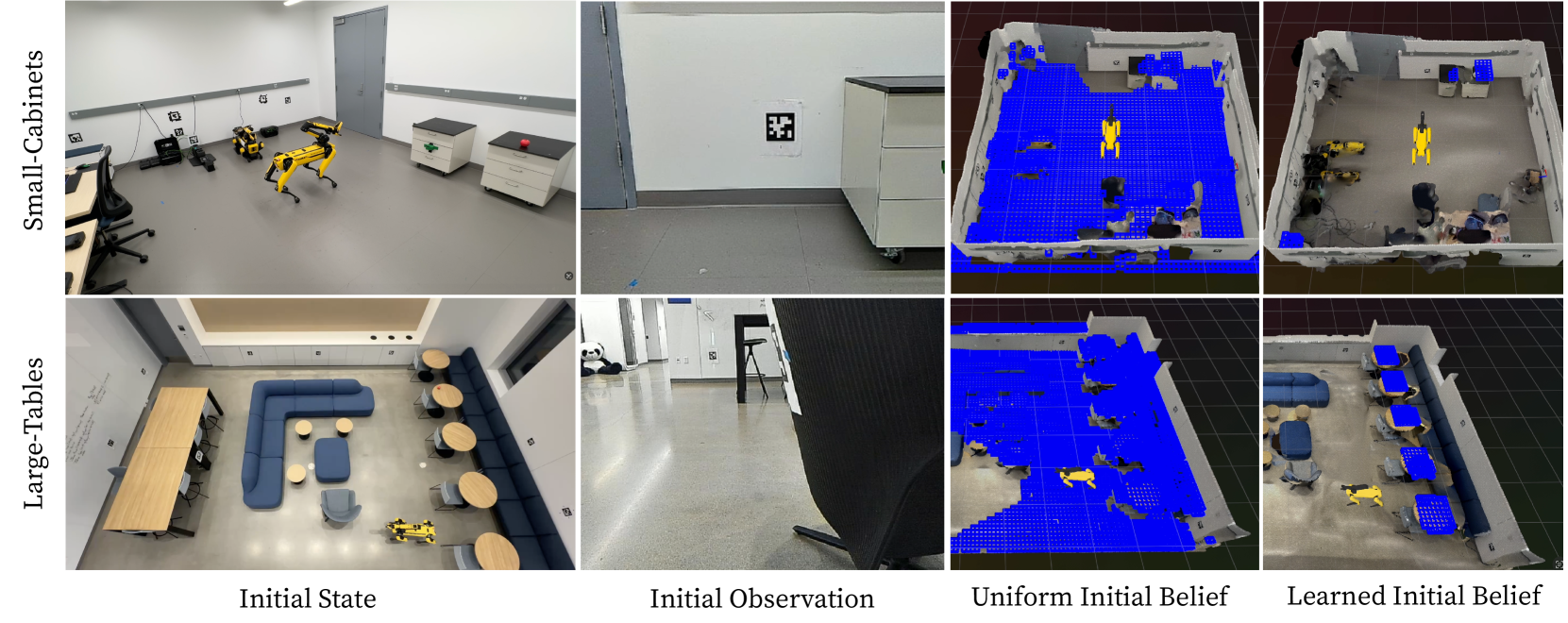
The image is a 2x4 grid comparing robotics environment representations across two scenarios: "Small-Cabinets" (top row) and "Large-Tables" (bottom row). Each row contains four images:
1. **Initial State** (real-world environment)
2. **Initial Observation** (partial sensor data)
3. **Uniform Initial Belief** (prior map assumption)
4. **Learned Initial Belief** (refined map after processing)
### Components/Axes
- **Row Labels**:
- Top row: "Small-Cabinets"
- Bottom row: "Large-Tables"
- **Column Labels**:
- Left to right: "Initial State", "Initial Observation", "Uniform Initial Belief", "Learned Initial Belief"
- **Color Coding**:
- **Yellow**: Robot (consistent across all images)
- **Blue**: Environment map (top-right images)
- **Black/White**: Obstacles/structures (top-right images)
### Detailed Analysis
#### Small-Cabinets Row
1. **Initial State**:
- A room with gray flooring, white walls, and a gray door.
- Contains two black cabinets with gray tops, a yellow robot, and scattered equipment (e.g., black boxes, cables).
2. **Initial Observation**:
- Close-up of the robot and cabinets.
- Limited sensor data: robot position and partial cabinet visibility.
3. **Uniform Initial Belief**:
- Blue grid map with sparse obstacle markers (black squares).
- Robot positioned centrally, but environment details are abstracted.
4. **Learned Initial Belief**:
- Refined blue grid map with accurate cabinet positions and robot placement.
- Obstacles (black squares) align with real-world objects.
#### Large-Tables Row
1. **Initial State**:
- Open space with gray flooring, white walls, and a large blue L-shaped couch.
- Contains round wooden tables, a gray chair, and a yellow robot near the couch.
2. **Initial Observation**:
- Partial view of the robot and couch.
- Limited sensor data: robot position and couch outline.
3. **Uniform Initial Belief**:
- Blue grid map with minimal obstacle markers.
- Robot positioned near the couch, but tables are not represented.
4. **Learned Initial Belief**:
- Refined blue grid map with accurate couch, table, and robot positions.
- Obstacles (black squares) align with real-world furniture.
### Key Observations
- **Spatial Accuracy**: The "Learned Initial Belief" images show significantly improved alignment with the "Initial State" compared to "Uniform Initial Belief".
- **Obstacle Representation**: Black squares in the top-right images correspond to real-world objects (cabinets, furniture).
- **Robot Positioning**: The yellow robot’s location in "Learned Initial Belief" matches its position in the "Initial State".
- **Environment Complexity**: The "Large-Tables" environment has more furniture, requiring more refined mapping.
### Interpretation
This visualization demonstrates how robotic systems refine their environmental understanding through sensor data processing. The "Uniform Initial Belief" represents a generic prior assumption, while the "Learned Initial Belief" incorporates real-world observations to improve accuracy. The progression from abstract grids to detailed maps highlights the importance of adaptive mapping algorithms in dynamic environments.
**Notable Trends**:
- The robot’s position remains consistent across all images, suggesting stable localization.
- Obstacle density increases in "Learned Initial Belief", reflecting better environmental awareness.
- The "Large-Tables" scenario shows greater complexity in mapping due to more furniture.