## Comparison of Robot Localization Methods
### Overview
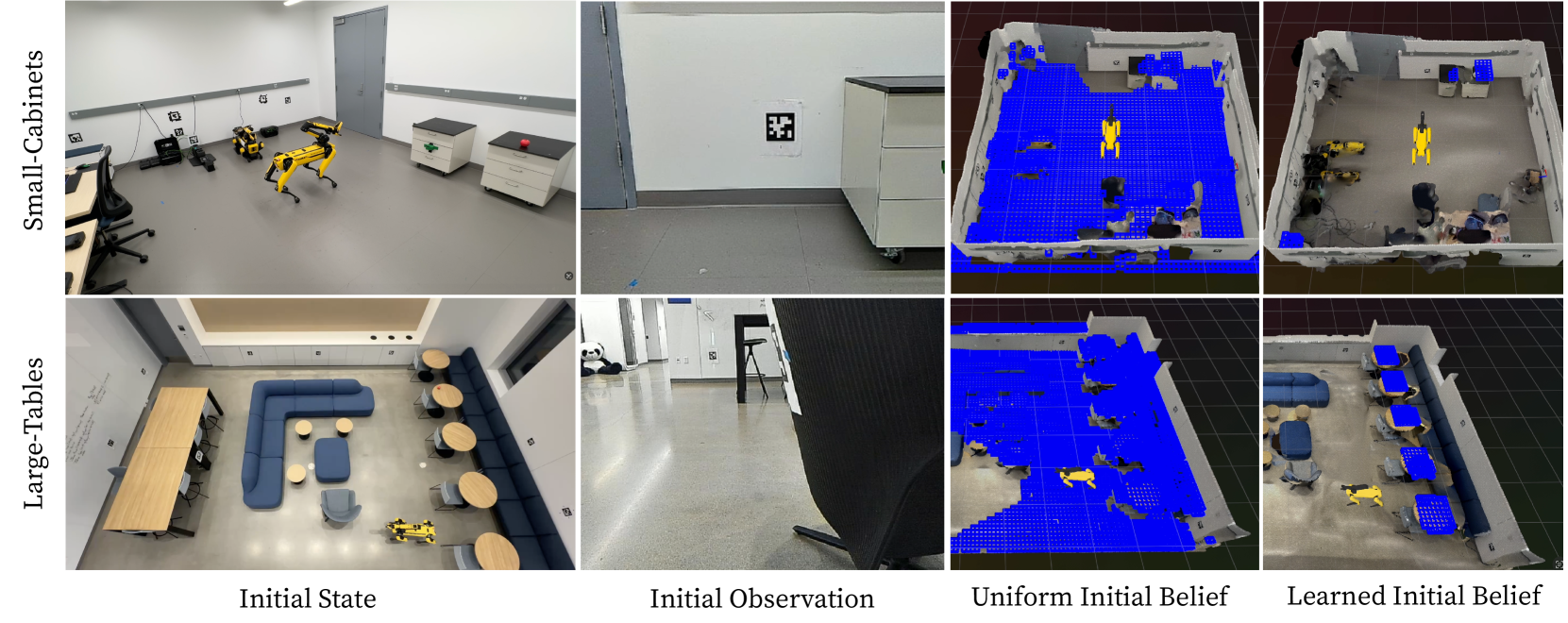
The image presents a comparison of robot localization methods in two different environments: one with small cabinets and another with large tables. For each environment, the image shows the initial state, initial observation, uniform initial belief, and learned initial belief. The robot's position is represented in yellow, and the environment is represented in blue in the belief states.
### Components/Axes
* **Rows:**
* Small-Cabinets
* Large-Tables
* **Columns:**
* Initial State: A photograph of the environment.
* Initial Observation: A photograph from the robot's perspective.
* Uniform Initial Belief: A 3D representation of the environment with a uniform probability distribution (blue) and the robot's location (yellow).
* Learned Initial Belief: A 3D representation of the environment with a learned probability distribution (blue) and the robot's location (yellow).
### Detailed Analysis or ### Content Details
**Row 1: Small-Cabinets**
* **Initial State:** A room with two cabinets, a chair, and two robots (one yellow, one black). There are also several markers on the wall.
* **Initial Observation:** A view of a cabinet with a marker on the wall.
* **Uniform Initial Belief:** A 3D representation of the room with a uniform probability distribution (blue) and the robot's location (yellow). The blue dots cover the entire floor.
* **Learned Initial Belief:** A 3D representation of the room with a learned probability distribution (blue) and the robot's location (yellow). The blue dots are concentrated around the objects in the room.
**Row 2: Large-Tables**
* **Initial State:** A room with a large table, a blue sofa, and several chairs. A yellow robot is visible.
* **Initial Observation:** A view of a black chair.
* **Uniform Initial Belief:** A 3D representation of the room with a uniform probability distribution (blue) and the robot's location (yellow). The blue dots cover the entire floor.
* **Learned Initial Belief:** A 3D representation of the room with a learned probability distribution (blue) and the robot's location (yellow). The blue dots are concentrated around the objects in the room.
### Key Observations
* The "Uniform Initial Belief" shows a uniform distribution of possible locations for the robot, indicated by the blue dots covering the entire floor area.
* The "Learned Initial Belief" shows a more refined probability distribution, with the blue dots concentrated around the actual objects in the environment. This indicates that the robot has learned to localize itself more accurately.
* The robot's position is indicated by the yellow figure in the "Uniform Initial Belief" and "Learned Initial Belief" columns.
### Interpretation
The image demonstrates the process of robot localization using different methods. The "Uniform Initial Belief" represents a state where the robot has no prior knowledge of its location. The "Learned Initial Belief" represents a state where the robot has learned to localize itself more accurately by observing its environment. The comparison between the two belief states highlights the effectiveness of the learning process in improving robot localization. The concentration of the blue dots in the "Learned Initial Belief" around the objects in the environment indicates that the robot has successfully learned to associate its observations with the objects in the environment.