## Diagram: Cognitive Architecture Overview
### Overview
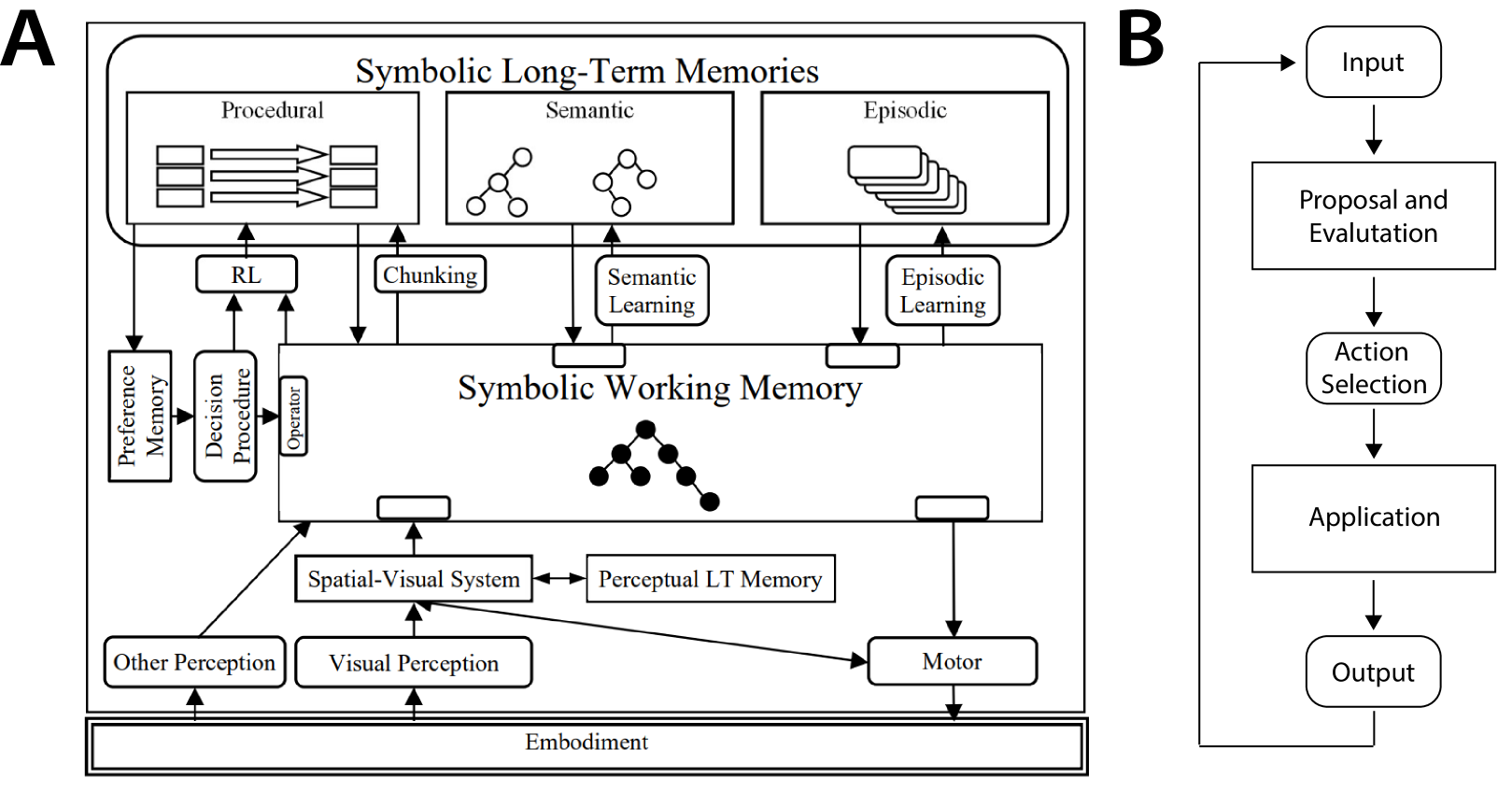
The image presents two interconnected diagrams (A and B) illustrating a cognitive architecture model. Diagram A focuses on memory systems and perceptual processing, while Diagram B outlines a decision-making workflow. Both diagrams use labeled boxes, arrows, and symbolic representations to depict information flow and system interactions.
### Components/Axes
#### Diagram A: Symbolic Long-Term Memories
- **Procedural Memory**: Contains three horizontal rectangles with bidirectional arrows, labeled "Procedural."
- **Semantic Memory**: Features two clusters of interconnected circles (nodes) labeled "Semantic."
- **Episodic Memory**: Stacked rectangles labeled "Episodic."
- **Symbolic Working Memory**: Central box with a triangular node structure, connected to:
- **Spatial-Visual System**: Box linked to "Visual Perception" and "Other Perception."
- **Perceptual LT Memory**: Box connected to "Spatial-Visual System."
- **Motor**: Box linked to "Symbolic Working Memory."
- **Inputs/Outputs**:
- **Preference Memory** → "Decision Procedure" → "Operator" → "Chunking" → "RL" (Reinforcement Learning).
- **Embediment**: Bottom box receiving inputs from "Visual Perception" and "Other Perception."
#### Diagram B: Decision-Making Workflow
- **Input** → **Proposal and Evaluation** → **Action Selection** → **Application** → **Output**.
- Arrows indicate sequential processing steps.
### Detailed Analysis
#### Diagram A
- **Procedural Memory**: Represents skill-based learning (e.g., motor skills), with bidirectional arrows suggesting iterative refinement.
- **Semantic Memory**: Node clusters imply hierarchical or networked knowledge storage (e.g., facts, concepts).
- **Episodic Memory**: Stacked rectangles suggest sequential event encoding (e.g., personal experiences).
- **Symbolic Working Memory**: Central hub integrating perceptual inputs (visual, spatial) and motor outputs, with a triangular node structure possibly representing dynamic information integration.
- **Perceptual Systems**: "Spatial-Visual System" and "Visual Perception" feed into working memory, while "Other Perception" (e.g., auditory, tactile) contributes via "Embediment."
#### Diagram B
- **Proposal and Evaluation**: Likely involves hypothesis generation and validation.
- **Action Selection**: Decision-making node selecting optimal actions based on proposals.
- **Application**: Execution phase, potentially interacting with external systems (e.g., robotics).
### Key Observations
1. **Memory Integration**: Diagram A emphasizes bidirectional interactions between memory systems (e.g., procedural memory influencing working memory via "Chunking").
2. **Perception-to-Action Flow**: Both diagrams highlight sensory input processing (Diagram A) and decision-to-action translation (Diagram B).
3. **Reinforcement Learning (RL)**: Positioned as a feedback loop in Diagram A, suggesting adaptive learning from environmental interactions.
### Interpretation
- **Cognitive Architecture**: The model integrates long-term memory systems (procedural, semantic, episodic) with real-time working memory and perceptual processing, enabling adaptive behavior.
- **Decision-Making Pipeline**: Diagram B abstracts a general workflow applicable to AI or robotics, where inputs are evaluated, actions are selected, and outcomes are applied.
- **Symbolic vs. Perceptual**: The separation of symbolic (abstract) and perceptual (sensory) systems in Diagram A reflects a dual-process theory of cognition, where abstract reasoning and sensory data converge in working memory.
- **Ambiguities**: The exact mechanisms of "Chunking" and "Embediment" are unspecified, leaving room for interpretation as either data compression techniques or feature extraction processes.
This architecture could underpin AI systems requiring both memory retention (e.g., semantic knowledge) and real-time decision-making (e.g., robotics), though further details on implementation are needed.