## Image Comparison: Ground-Truth vs. Generated Video Frames
### Overview
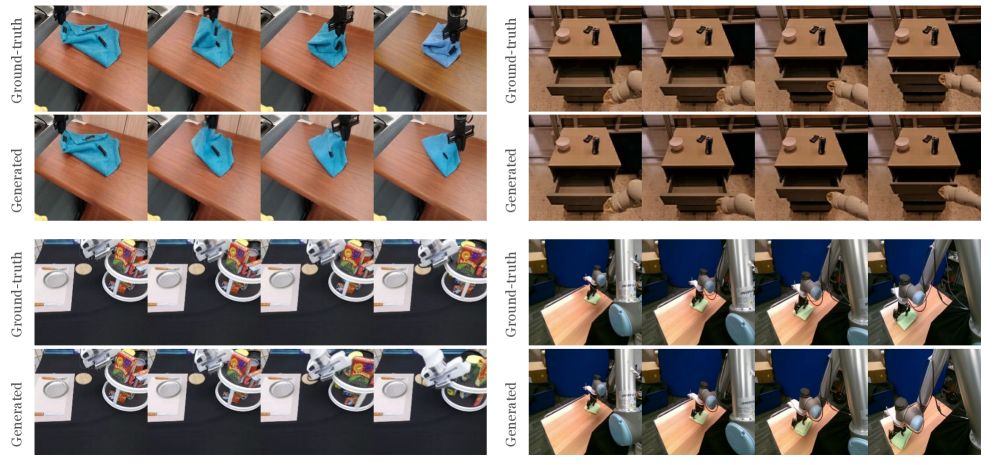
The image presents a side-by-side comparison of **ground-truth video frames** (actual robotic actions) and **generated video frames** (simulated or reconstructed actions) across four distinct robotic manipulation tasks. Each task is labeled with a descriptive title, and the frames are arranged in two rows: the top row shows ground-truth, while the bottom row shows generated results.
---
### Components/Axes
1. **Task Labels**:
- **Top-Left**: "Object Manipulation (Blue Towel)"
- **Top-Right**: "Object Arrangement (Stacked Items)"
- **Bottom-Left**: "Object Interaction (Drawer and Bottle)"
- **Bottom-Right**: "Object Relocation (Blue Bowl)"
2. **Frame Structure**:
- Each task contains **4 frames** (temporal sequence).
- Frames are labeled implicitly by their position in the sequence (left to right).
3. **Visual Elements**:
- **Ground-truth**: High-resolution, realistic robotic actions.
- **Generated**: Simulated actions with noticeable discrepancies in object placement, motion, and interaction fidelity.
---
### Detailed Analysis
#### 1. Object Manipulation (Blue Towel)
- **Ground-truth**:
- A robotic arm grasps a blue towel on a wooden surface, lifts it, and folds it neatly.
- Towel remains upright during manipulation.
- **Generated**:
- Towel appears slightly misaligned in the final frame (tilted or partially unfolded).
- Arm trajectory deviates slightly from ground-truth, suggesting motion planning inaccuracies.
#### 2. Object Arrangement (Stacked Items)
- **Ground-truth**:
- Items (e.g., cans, plates) are stacked symmetrically on a dark surface.
- Robotic arm adjusts positions with precision.
- **Generated**:
- Items are misaligned (e.g., cans tilted, plates uneven).
- Arm fails to maintain consistent spacing between objects.
#### 3. Object Interaction (Drawer and Bottle)
- **Ground-truth**:
- Arm opens a wooden drawer, places a black bottle inside, and closes it.
- Drawer opens fully, bottle is centered.
- **Generated**:
- Drawer opens only partially; bottle is misplaced (off-center or tilted).
- Arm motion is jerky compared to smooth ground-truth movement.
#### 4. Object Relocation (Blue Bowl)
- **Ground-truth**:
- Arm lifts a blue bowl from a table and places it on a secondary surface.
- Bowl remains upright throughout.
- **Generated**:
- Bowl is dropped or misplaced in the final frame (e.g., tilted or on the wrong surface).
- Arm trajectory diverges significantly from ground-truth.
---
### Key Observations
1. **Task Complexity Correlation**:
- Simpler tasks (e.g., towel folding) show smaller discrepancies than complex ones (e.g., drawer interaction).
2. **Motion Fidelity**:
- Generated frames exhibit unnatural arm movements (e.g., jerky motions, incorrect trajectories).
3. **Object Placement Errors**:
- Final frames often show objects in incorrect orientations or positions (e.g., tilted bowls, misaligned stacks).
---
### Interpretation
The image highlights limitations in generated video reconstruction for robotic tasks. Discrepancies suggest challenges in:
- **Physics Simulation**: Generated frames fail to replicate realistic object dynamics (e.g., bowl dropping).
- **Motion Planning**: Arm trajectories deviate from ground-truth, indicating potential issues in inverse kinematics or sensor feedback.
- **Task-Specific Accuracy**: Complex interactions (e.g., drawer opening) are more error-prone, possibly due to higher degrees of freedom or occlusions.
These findings underscore the need for improved simulation models to bridge the gap between ground-truth and generated data in robotics training and testing.