## Image Comparison: Ground-Truth vs. Generated Scenes
### Overview
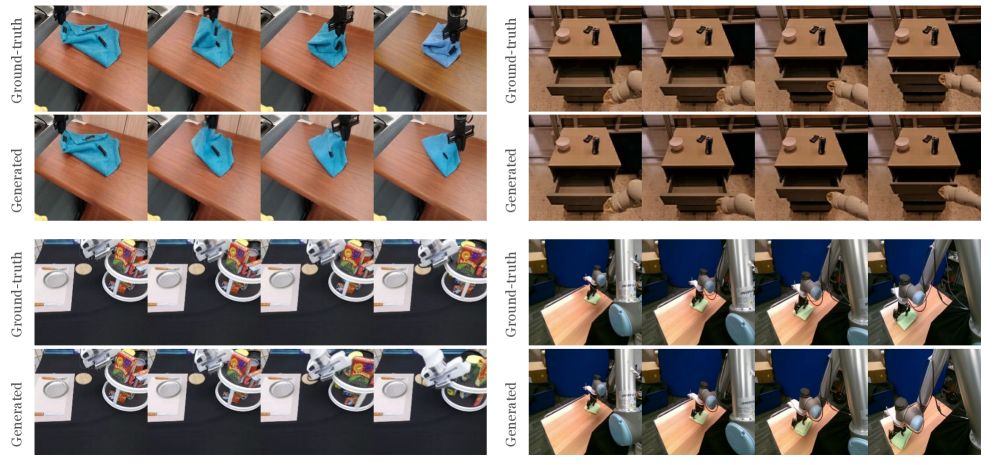
The image presents a visual comparison between "Ground-truth" and "Generated" scenes across four different scenarios. Each scenario is displayed in two rows, with the top row showing the ground-truth images and the bottom row showing the corresponding generated images. The scenarios involve a robot arm interacting with various objects and environments.
### Components/Axes
* **Rows:** Labeled "Ground-truth" and "Generated" on the left side of the image.
* **Columns:** Four distinct scenarios are presented from left to right.
* **Scenarios:**
1. Robot arm manipulating a blue cloth on a wooden table.
2. Robot arm interacting with a wooden drawer and objects on top of it.
3. Robot arm interacting with objects on a black table, including a white plate and a container with various items.
4. Robot arm interacting with a green object on a wooden table.
### Detailed Analysis or ### Content Details
**Scenario 1: Blue Cloth on Wooden Table**
* **Ground-truth:** The top row shows the robot arm manipulating a blue cloth on a wooden table. The cloth's position and orientation change across the three images.
* **Generated:** The bottom row shows the generated images of the same scenario. The generated images appear similar to the ground-truth images, with the cloth in comparable positions.
**Scenario 2: Wooden Drawer and Objects**
* **Ground-truth:** The top row shows a wooden drawer with a cylindrical object and a rectangular object on top. The drawer is in different states of being opened.
* **Generated:** The bottom row shows the generated images of the same scenario. The generated images closely resemble the ground-truth images, with similar drawer positions and object placements.
**Scenario 3: Objects on Black Table**
* **Ground-truth:** The top row shows a black table with a white plate, a container with various items, and other objects. The robot arm interacts with these objects.
* **Generated:** The bottom row shows the generated images of the same scenario. The generated images show similar object arrangements and interactions as the ground-truth images.
**Scenario 4: Green Object on Wooden Table**
* **Ground-truth:** The top row shows a robot arm interacting with a green object on a wooden table.
* **Generated:** The bottom row shows the generated images of the same scenario. The generated images appear similar to the ground-truth images, with the robot arm interacting with the green object in comparable ways.
### Key Observations
* The generated images generally resemble the ground-truth images across all four scenarios.
* The quality of the generated images appears to be relatively consistent across the different scenarios.
* There are minor differences between the ground-truth and generated images, particularly in the details of the objects and the lighting.
### Interpretation
The image demonstrates the capability of a generative model to create realistic images of a robot arm interacting with various objects and environments. The close resemblance between the ground-truth and generated images suggests that the model has learned to capture the key features of the scenes. This could be useful for training robots in simulation or for generating synthetic data for other machine learning tasks.