## Traffic Scenario Analysis with Decision Logic Diagrams
### Overview
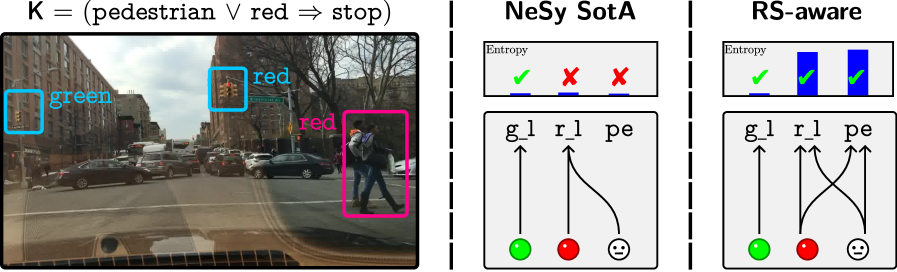
The image presents a multi-part technical visualization analyzing traffic decision-making logic. Left section shows a street scene with annotated traffic elements, while right sections contain two decision logic diagrams comparing system architectures.
### Components/Axes
**Left Image (Traffic Scene):**
- Annotated elements:
- Traffic lights:
- Green light (blue box, left side)
- Red light (blue box, center)
- Pedestrian: Pink box (right side)
- Text annotations:
- "K = (pedestrian ∨ red ⇒ stop)" (top-left)
- "red" labels (blue and pink boxes)
**Right Diagrams:**
1. **NeSy SotA Diagram:**
- Table:
- Header: "Entropy"
- Entries:
- Green checkmark (✓)
- Red X (×)
- Red X (×)
- Flow diagram:
- Nodes:
- Green circle (g₁)
- Red circle (r₁)
- Pedestrian symbol (pe)
- Arrows:
- g₁ → pe
- r₁ → pe
2. **RS-aware Diagram:**
- Table:
- Header: "Entropy"
- Entries:
- Green checkmark (✓)
- Green checkmark (✓)
- Green checkmark (✓)
- Flow diagram:
- Nodes:
- Green circle (g₁)
- Red circle (r₁)
- Pedestrian symbol (pe)
- Arrows:
- g₁ → pe
- r₁ → pe
- pe → pe (self-loop)
### Detailed Analysis
**Traffic Scene:**
- Urban street view from vehicle perspective
- Three traffic lights visible:
- Left: Green (annotated)
- Center: Red (annotated)
- Right: Red (annotated)
- Pedestrian crossing street (pink box)
- Vehicles: Multiple cars in traffic lanes
**NeSy SotA Diagram:**
- Entropy table shows:
- Green light: ✓ (valid)
- Red light: × (invalid)
- Pedestrian: × (invalid)
- Flow diagram shows:
- Green and red lights influence pedestrian decision
- No self-loop or feedback mechanism
**RS-aware Diagram:**
- Entropy table shows:
- All elements (green, red, pedestrian): ✓ (valid)
- Flow diagram shows:
- Bidirectional influence between elements
- Pedestrian symbol has self-loop (pe → pe)
- More complex interdependencies
### Key Observations
1. **Decision Logic:**
- K rule enforces stop when pedestrian OR red light present
- NeSy SotA only validates green/red lights
- RS-aware validates all three elements (green, red, pedestrian)
2. **System Differences:**
- NeSy SotA: Simpler, single-direction influence
- RS-aware: More comprehensive, includes pedestrian awareness
- RS-aware's self-loop suggests continuous monitoring
3. **Entropy Validation:**
- Green light consistently valid in both systems
- Red light invalid in NeSy SotA but valid in RS-aware
- Pedestrian validation only in RS-aware
### Interpretation
The diagrams demonstrate two approaches to traffic decision-making:
1. **NeSy SotA** focuses on traffic light states but neglects pedestrian presence in entropy calculations, potentially leading to unsafe decisions when pedestrians are present.
2. **RS-aware** system shows improved safety by:
- Validating all three elements (green/red lights + pedestrian)
- Implementing bidirectional influence between components
- Including self-monitoring through pedestrian self-loop
3. The logical rule K (pedestrian OR red ⇒ stop) is foundational to both systems but implemented with different granularity. RS-aware's comprehensive validation aligns more closely with real-world safety requirements, suggesting better suitability for autonomous vehicle systems where pedestrian awareness is critical.