## Diagram: Autonomous Agent System Architecture
### Overview
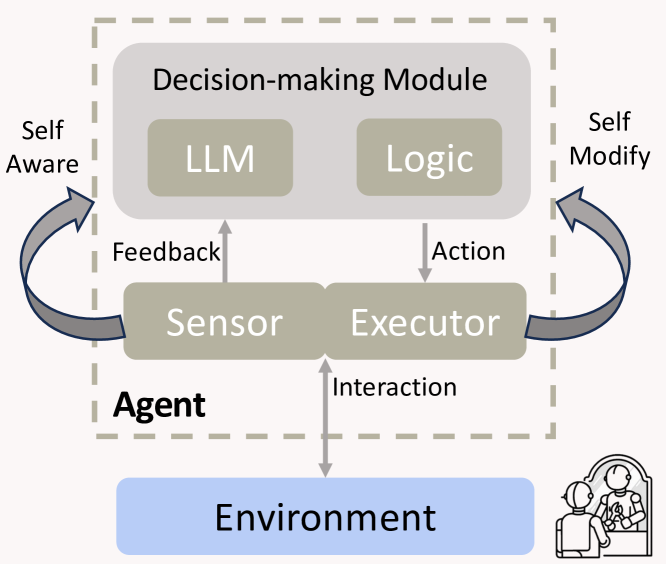
The diagram illustrates an autonomous agent system interacting with its environment. The agent comprises a decision-making module (integrating LLM and Logic), sensors, and executors, with feedback loops for self-awareness and self-modification. The environment is depicted as a separate entity, with interactions flowing bidirectionally.
### Components/Axes
1. **Decision-Making Module**:
- Contains two sub-components:
- **LLM** (Large Language Model)
- **Logic** (Rule-based reasoning)
- Receives **Feedback** from Sensors and Executors.
- Generates **Action** commands for Executors.
2. **Sensor**:
- Provides environmental data to the Decision-Making Module via **Feedback** arrows.
3. **Executor**:
- Executes actions dictated by the Decision-Making Module.
- Sends **Action** outputs to the Environment.
4. **Agent**:
- Encompasses the Decision-Making Module, Sensor, and Executor.
- Features **Self-Aware** and **Self-Modify** feedback loops to refine its internal processes.
5. **Environment**:
- Receives **Action** inputs from the Executor.
- Provides **Interaction** data back to the Agent.
6. **Inset Image**:
- A visual metaphor (bottom-right corner) showing a robot interacting with a mirror, symbolizing self-awareness.
### Spatial Grounding
- **Top Section**: Decision-Making Module (LLM and Logic) is centrally positioned.
- **Middle Section**: Sensor (left) and Executor (right) are aligned horizontally below the Decision-Making Module.
- **Bottom Section**: Environment spans the width of the diagram.
- **Inset**: Located in the bottom-right corner, outside the main dashed boundary.
### Detailed Analysis
- **Flow Direction**:
- **Feedback** loops from Sensor and Executor to the Decision-Making Module indicate iterative refinement of decisions.
- **Action** flows from the Decision-Making Module to the Executor, then to the Environment.
- **Self-Aware** and **Self-Modify** loops suggest the Agent adjusts its internal logic based on internal states.
- **Modular Design**:
- Separation of Sensor (input) and Executor (output) emphasizes modularity.
- LLM and Logic operate in parallel within the Decision-Making Module, enabling hybrid reasoning.
### Key Observations
1. **Closed-Loop System**: The agent continuously adapts via feedback from both the environment and its own actions.
2. **Hybrid Intelligence**: Combines data-driven (LLM) and rule-based (Logic) approaches for decision-making.
3. **Self-Improvement**: The **Self-Modify** loop implies the system can optimize its own processes over time.
4. **Environmental Interaction**: The agent’s actions directly influence the environment, which in turn provides new data for learning.
### Interpretation
This architecture represents a **cognitive agent** capable of autonomous operation in dynamic environments. The integration of LLM and Logic allows the system to handle both ambiguous (via LLM) and structured (via Logic) scenarios. The **Self-Aware** and **Self-Modify** loops suggest the agent can evolve its behavior, potentially leading to emergent capabilities. The inset image reinforces the theme of self-awareness, positioning the system as a step toward artificial general intelligence (AGI).
**Notable Design Choices**:
- The dashed boundary around the Agent highlights its autonomy from the Environment.
- Arrows are bidirectional for Feedback/Action loops but unidirectional for Self-Aware/Self-Modify, emphasizing internal vs. external interactions.
- The inset image serves as a conceptual anchor for the abstract "Self-Aware" concept.