## Chart: Robot Proactivity Across Speed Scenarios
### Overview
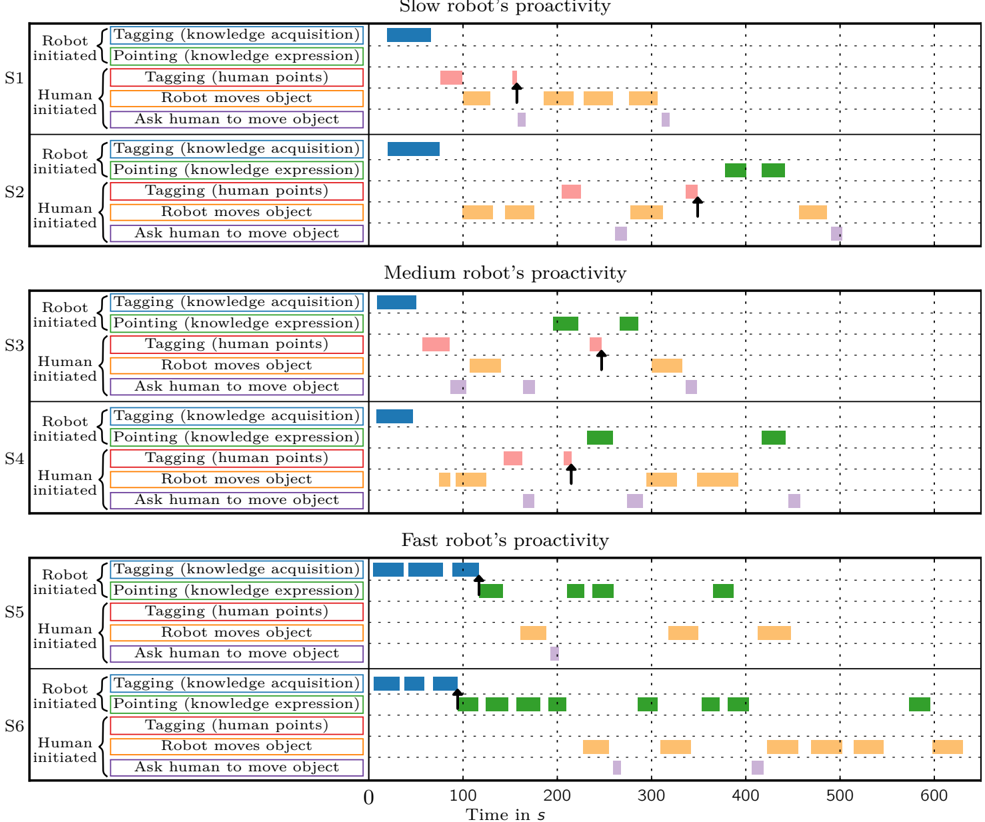
The image is a comparative timeline chart analyzing robot and human-initiated actions across three robot speed scenarios: Slow, Medium, and Fast. Each scenario contains two sub-scenarios (S1-S6), with actions represented as colored bars along a time axis (0–600 seconds). The chart emphasizes differences in task initiation, coordination, and efficiency between robot autonomy and human intervention.
---
### Components/Axes
- **X-axis**: "Time in s" (0–600 seconds, linear scale).
- **Y-axis**: Scenarios labeled S1–S6, grouped into three sections:
- **Slow robot’s proactivity** (top section)
- **Medium robot’s proactivity** (middle section)
- **Fast robot’s proactivity** (bottom section)
- **Legend**: Located on the right, mapping colors to actions:
- **Blue**: Tagging (knowledge acquisition)
- **Green**: Pointing (knowledge expression)
- **Red**: Tagging (human points)
- **Orange**: Robot moves object
- **Purple**: Ask human to move object
---
### Detailed Analysis
#### Slow Robot’s Proactivity
- **S1**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
- **S2**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
#### Medium Robot’s Proactivity
- **S3**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
- **S4**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
#### Fast Robot’s Proactivity
- **S5**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
- **S6**:
- Robot-initiated:
- Tagging (blue, ~50s)
- Pointing (green, ~100s)
- Human-initiated:
- Tagging (red, ~150s)
- Robot moves object (orange, ~200s)
- Ask human to move object (purple, ~250s)
---
### Key Observations
1. **Action Timing**:
- Robot-initiated actions (Tagging, Pointing) consistently occur earlier (~50–100s) across all scenarios.
- Human-initiated actions (Tagging, Robot moves object, Ask human to move object) cluster between ~150–250s.
2. **Speed Correlation**:
- Faster robots show tighter clustering of robot-initiated actions (e.g., S5–S6: Tagging and Pointing overlap at ~50–100s).
- Slower robots exhibit more spaced-out human-initiated actions (e.g., S1–S2: Human Tagging at ~150s, Robot moves object at ~200s).
3. **Action Frequency**:
- "Ask human to move object" (purple) appears only in human-initiated phases, suggesting reactive human intervention in slower scenarios.
4. **Duration**:
- Robot moves object (orange) spans ~200–400s in all scenarios, indicating prolonged execution time.
---
### Interpretation
- **Robot Autonomy vs. Human Collaboration**:
- Faster robots prioritize autonomous task completion (Tagging/Pointing), while slower robots rely more on human input (Tagging/human points, Ask human to move object).
- The "Robot moves object" action dominates across all scenarios, suggesting it is a core task regardless of speed.
- **Efficiency Trade-offs**:
- Faster robots reduce time between robot-initiated actions but may require more human oversight for complex tasks (e.g., object movement).
- Slower robots allow more human intervention but risk delays in task progression.
- **Outliers**:
- In S1–S2 (Slow), the "Ask human to move object" action occurs later (~250s) compared to faster scenarios, highlighting inefficiency in human-robot coordination under low-speed conditions.
---
### Key Trends
- **Time Series**:
- Robot-initiated actions (blue/green) precede human-initiated actions (red/orange/purple) in all scenarios.
- Faster robots compress the timeline between robot and human actions, while slower robots extend this gap.
- **Color Consistency**:
- All legend colors (blue, green, red, orange, purple) are consistently applied across scenarios, confirming accurate categorization.
---
### Conclusion
The chart demonstrates that robot speed directly impacts task initiation and human-robot collaboration dynamics. Faster robots optimize autonomous workflows, while slower robots necessitate greater human involvement, potentially at the cost of efficiency. This data could inform adaptive robot control systems that balance autonomy and human oversight based on operational speed requirements.