## Activity Timeline: Robot Proactivity Comparison
### Overview
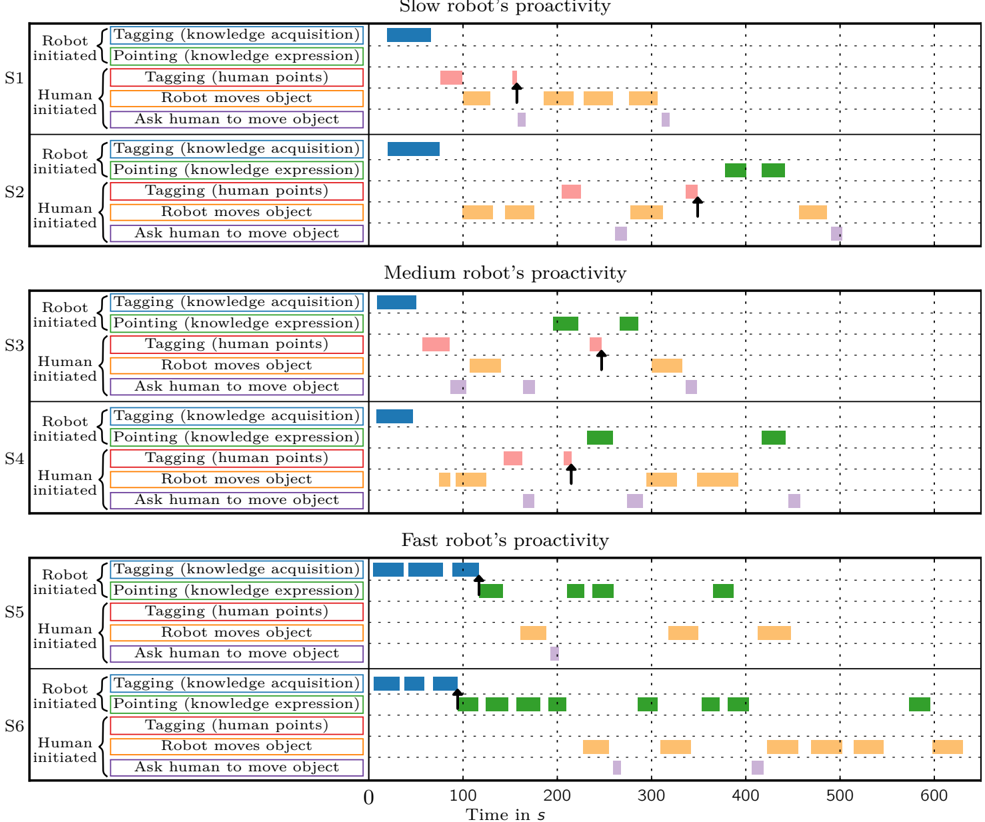
The image presents a series of timeline charts comparing the proactivity of robots with slow, medium, and fast response times across different scenarios (S1-S6). The charts illustrate the timing and sequence of robot-initiated and human-initiated actions, categorized as "Tagging (knowledge acquisition)", "Pointing (knowledge expression)", "Tagging (human points)", "Robot moves object", and "Ask human to move object". The x-axis represents time in seconds, ranging from 0 to 600.
### Components/Axes
* **Titles:**
* Top Chart: "Slow robot's proactivity"
* Middle Chart: "Medium robot's proactivity"
* Bottom Chart: "Fast robot's proactivity"
* **Y-Axis Labels:**
* "Robot initiated"
* "Human initiated"
* **X-Axis Label:** "Time in s"
* **X-Axis Scale:** 0, 100, 200, 300, 400, 500, 600
* **Activity Legend (Left side of each chart):**
* Blue: "Tagging (knowledge acquisition)"
* Green: "Pointing (knowledge expression)"
* Red: "Tagging (human points)"
* Orange: "Robot moves object"
* Purple: "Ask human to move object"
* **Scenario Labels:** S1, S2, S3, S4, S5, S6
* **Arrows:** Black arrows pointing upwards, indicating a specific event.
### Detailed Analysis
Each scenario (S1-S6) is divided into two timelines: one for robot-initiated actions and one for human-initiated actions. The colored blocks on the timelines represent the duration and timing of each action.
**Slow Robot's Proactivity:**
* **S1:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early, followed by a "Tagging (human points)" (red) event around 150s. "Robot moves object" (orange) occurs around 250s. "Ask human to move object" (purple) occurs around 250s.
* Human initiated: "Robot moves object" (orange) occurs around 350s. "Ask human to move object" (purple) occurs around 350s.
* **S2:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early.
* Human initiated: "Tagging (human points)" (red) occurs around 250s. "Pointing (knowledge expression)" (green) occurs around 400s. "Robot moves object" (orange) occurs around 500s. "Ask human to move object" (purple) occurs around 500s.
**Medium Robot's Proactivity:**
* **S3:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early. "Tagging (human points)" (red) occurs around 100s. "Pointing (knowledge expression)" (green) occurs around 200s.
* Human initiated: "Robot moves object" (orange) occurs around 300s. "Ask human to move object" (purple) occurs around 300s.
* **S4:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early.
* Human initiated: "Tagging (human points)" (red) occurs around 150s. "Robot moves object" (orange) occurs around 300s. "Pointing (knowledge expression)" (green) occurs around 400s. "Ask human to move object" (purple) occurs around 400s.
**Fast Robot's Proactivity:**
* **S5:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early. "Pointing (knowledge expression)" (green) occurs around 100s.
* Human initiated: "Robot moves object" (orange) occurs around 300s. "Ask human to move object" (purple) occurs around 300s.
* **S6:**
* Robot initiated: "Tagging (knowledge acquisition)" (blue) occurs early. "Pointing (knowledge expression)" (green) occurs around 100s.
* Human initiated: "Robot moves object" (orange) occurs around 400s. "Ask human to move object" (purple) occurs around 500s.
### Key Observations
* "Tagging (knowledge acquisition)" (blue) is consistently initiated by the robot early in each scenario, regardless of robot speed.
* The timing of human-initiated actions varies across scenarios and robot speeds.
* The "Pointing (knowledge expression)" (green) action appears more frequently with faster robots.
* The black arrows point to "Pointing (knowledge expression)" (green) events initiated by the robot.
### Interpretation
The charts suggest that robot proactivity, particularly in terms of "Pointing (knowledge expression)", increases with robot speed. The "Tagging (knowledge acquisition)" action is a consistent initial step for the robot, regardless of speed. Human-initiated actions seem to be influenced by the robot's speed and the specific scenario. The data implies a correlation between robot response time and the frequency and timing of certain actions, indicating that faster robots may be more proactive in expressing knowledge. The consistent early "Tagging" suggests a foundational behavior, while the variable human responses highlight the interactive nature of the scenarios.