\n
## Timeline Chart: Robot Proactivity Across Speeds
### Overview
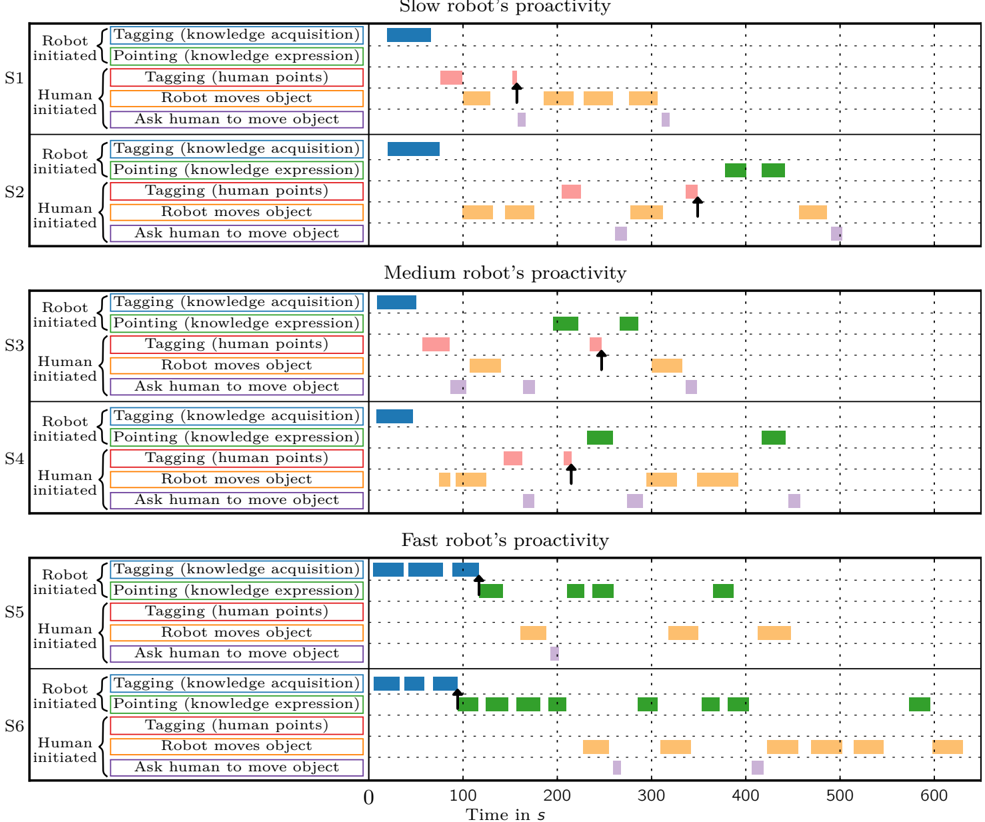
The image presents a timeline chart comparing the proactivity of robots operating at three different speeds: Slow, Medium, and Fast. The chart displays the timing of various actions initiated by either the robot or a human during a collaborative task involving object manipulation. Each row represents a single trial (S1-S6), and the chart visualizes the sequence and duration of actions like tagging, pointing, robot movement, and requests for human assistance.
### Components/Axes
* **Y-axis:** Represents the trial number, labeled S1 through S6.
* **X-axis:** Represents time in seconds (s), ranging from 0 to 600.
* **Rows:** Each row corresponds to a single trial.
* **Color Coding:**
* Red: Tagging (knowledge acquisition)
* Green: Pointing (knowledge expression)
* Blue: Tagging (human points)
* Purple: Robot moves object
* Cyan: Ask human to move object
* **Initiator Labels:** Each trial is divided into sections labeled "Robot initiated" and "Human initiated", indicating the source of the action.
* **Titles:** Each set of trials (S1/S2, S3/S4, S5/S6) is labeled with the robot speed: "Slow robot's proactivity", "Medium robot's proactivity", and "Fast robot's proactivity" respectively.
* **Arrows:** Black arrows are present in each set of trials, pointing to specific events on the timeline.
### Detailed Analysis or Content Details
**Slow Robot's Proactivity (S1 & S2)**
* **S1:** Robot initiates tagging around 20s, pointing around 60s, tagging (human points) around 120s, robot moves object around 180s, and asks human to move object around 300s.
* **S2:** Robot initiates tagging around 40s, pointing around 100s, tagging (human points) around 200s, robot moves object around 260s, and asks human to move object around 400s.
* The arrow in both S1 and S2 points to the "Ask human to move object" event.
**Medium Robot's Proactivity (S3 & S4)**
* **S3:** Robot initiates tagging around 20s, pointing around 60s, tagging (human points) around 120s, robot moves object around 180s, and asks human to move object around 240s.
* **S4:** Robot initiates tagging around 40s, pointing around 100s, tagging (human points) around 160s, robot moves object around 220s, and asks human to move object around 280s.
* The arrow in both S3 and S4 points to the "Ask human to move object" event.
**Fast Robot's Proactivity (S5 & S6)**
* **S5:** Robot initiates tagging around 20s, pointing around 60s, tagging (human points) around 100s, robot moves object around 140s, and asks human to move object around 180s.
* **S6:** Robot initiates tagging around 40s, pointing around 80s, tagging (human points) around 120s, robot moves object around 160s, and asks human to move object around 200s.
* The arrow in both S5 and S6 points to the "Ask human to move object" event.
### Key Observations
* As robot speed increases, the time at which the robot asks the human to move the object decreases. This suggests that faster robots are more proactive in completing the task independently before requesting assistance.
* The sequence of actions (tagging, pointing, tagging human points, robot move, ask human) remains consistent across all speeds.
* The duration of each action appears relatively consistent within each speed category, but the overall timeline is compressed for faster robots.
* The arrows consistently highlight the "Ask human to move object" event, suggesting this is a key point of comparison across the different robot speeds.
### Interpretation
The data demonstrates a clear relationship between robot speed and proactivity. Faster robots exhibit a shorter time to request human assistance, indicating they attempt to complete more of the task autonomously before seeking help. This suggests that increased speed enables the robot to process information and execute actions more efficiently, reducing the need for immediate human intervention.
The consistent sequence of actions across all speeds implies a standardized task execution protocol. The robot first acquires knowledge through tagging, expresses its understanding through pointing, identifies relevant human points, attempts to move the object itself, and finally, if necessary, requests human assistance.
The arrows focusing on the "Ask human to move object" event highlight the point at which the robot's autonomous capabilities are exhausted. Comparing the timing of this event across different speeds provides a quantifiable measure of the robot's proactivity. The data suggests that increasing robot speed leads to a more proactive and autonomous behavior in this collaborative task. The trials are structured to show the robot's progression through the task, and the consistent structure allows for a direct comparison of the timing of events across different robot speeds.