## Task-Oriented Robot Navigation and Manipulation
### Overview
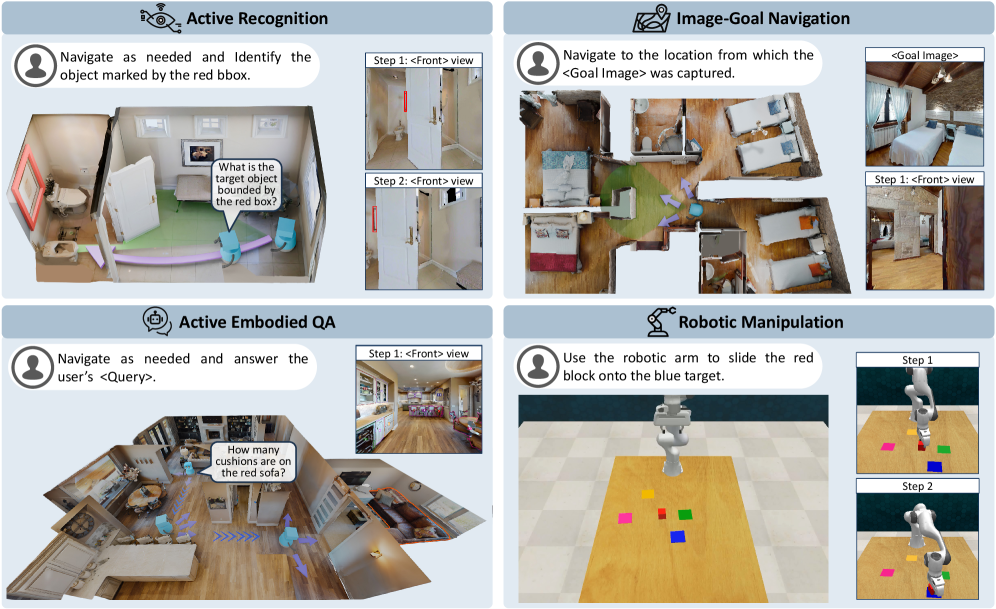
The image presents four distinct tasks for robot navigation and manipulation within simulated environments. Each task is visually depicted with a top-down view of the environment, robot agent(s), and target objects or goals. The tasks are: Active Recognition, Image-Goal Navigation, Active Embodied QA, and Robotic Manipulation. Each task includes a brief description of the objective and visual examples of the environment and robot actions.
### Components/Axes
**1. Active Recognition:**
* **Title:** Active Recognition
* **Objective:** Navigate as needed and identify the object marked by the red bounding box (bbox).
* **Environment:** A bathroom scene with a toilet, sink, door, and other furniture.
* **Agent:** Represented by a humanoid icon.
* **Visual Cues:**
* Red bounding box highlighting a specific object (e.g., a door frame).
* Green shaded area indicating the navigable space.
* Purple arrows indicating the agent's movement.
* **Steps:**
* Step 1: <Front> view - A front view of a door with a red bounding box around the door frame.
* Step 2: <Front> view - A front view of a door with a red bounding box around the door frame.
* **Question:** "What is the target object bounded by the red box?"
**2. Image-Goal Navigation:**
* **Title:** Image-Goal Navigation
* **Objective:** Navigate to the location from which the <Goal Image> was captured.
* **Environment:** A bedroom scene with beds, furniture, and windows.
* **Agent:** Represented by a humanoid icon.
* **Visual Cues:**
* <Goal Image>: A photograph of the bedroom from a specific viewpoint.
* Green shaded area indicating the navigable space.
* Purple arrows indicating the agent's movement.
* **Steps:**
* Step 1: <Front> view - A front view of the bedroom matching the <Goal Image>.
* <Goal Image>: A photograph of the bedroom from a specific viewpoint.
**3. Active Embodied QA:**
* **Title:** Active Embodied QA
* **Objective:** Navigate as needed and answer the user's <Query>.
* **Environment:** A living room/kitchen scene with sofas, tables, chairs, and kitchen appliances.
* **Agent:** Represented by a humanoid icon.
* **Visual Cues:**
* Purple arrows indicating the agent's movement.
* **Steps:**
* Step 1: <Front> view - A front view of the kitchen area.
* **Question:** "How many cushions are on the red sofa?"
**4. Robotic Manipulation:**
* **Title:** Robotic Manipulation
* **Objective:** Use the robotic arm to slide the red block onto the blue target.
* **Environment:** A table with colored blocks (red, blue, yellow, green).
* **Agent:** Represented by a robotic arm.
* **Visual Cues:**
* Colored blocks (red, blue, yellow, green).
* **Steps:**
* Step 1: The robotic arm is positioned above the table with the colored blocks.
* Step 2: The robotic arm has moved the red block onto the blue target.
### Detailed Analysis or ### Content Details
* **Active Recognition:** The agent needs to identify the object within the red bounding box by navigating the environment. The example shows the agent identifying a door frame.
* **Image-Goal Navigation:** The agent needs to navigate to the location where the goal image was taken. The example shows the agent navigating to a specific viewpoint in a bedroom.
* **Active Embodied QA:** The agent needs to answer a question about the environment by navigating and observing. The example shows the agent answering a question about the number of cushions on a red sofa.
* **Robotic Manipulation:** The robotic arm needs to manipulate objects in the environment to achieve a specific goal. The example shows the arm sliding a red block onto a blue target.
### Key Observations
* The tasks involve different levels of complexity, ranging from object recognition to question answering and robotic manipulation.
* The environments are simulated and visually realistic.
* The agents are represented by humanoid icons or robotic arms.
* The tasks require both navigation and interaction with the environment.
### Interpretation
The image illustrates a range of tasks that robots can perform in simulated environments. These tasks demonstrate the capabilities of robots in areas such as object recognition, navigation, question answering, and manipulation. The tasks are designed to be challenging and require robots to reason about the environment and interact with it in a meaningful way. The image suggests that robots are becoming increasingly capable of performing complex tasks in real-world environments.