## Flowchart: Vehicle Braking Control System
### Overview
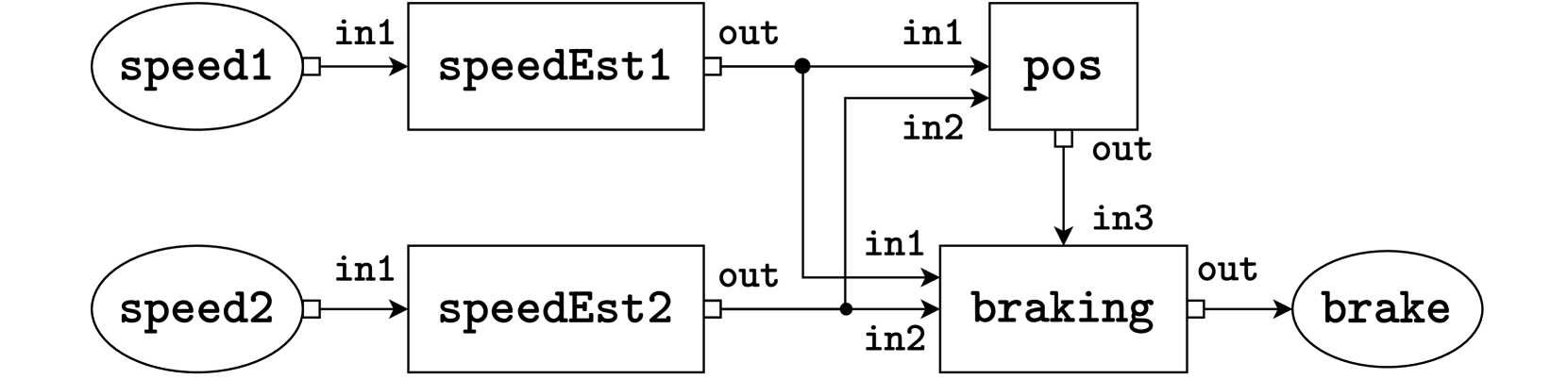
The diagram illustrates a control system for vehicle braking, integrating speed estimation, positional data, and braking logic. It features two speed sensors (speed1, speed2), two speed estimators (speedEst1, speedEst2), a position calculator (pos), a braking logic module (braking), and a brake actuator (brake). Data flows through input/output connections (in1, in2, in3, out) between components.
### Components/Axes
- **Nodes**:
- `speed1`, `speed2` (input sensors)
- `speedEst1`, `speedEst2` (speed estimation modules)
- `pos` (position calculator)
- `braking` (braking logic)
- `brake` (output actuator)
- **Connections**:
- Arrows represent data flow (e.g., `speed1 → speedEst1 → pos`).
- Inputs/outputs labeled as `in1`, `in2`, `in3`, `out`.
### Detailed Analysis
1. **Speed Estimation**:
- `speed1` and `speed2` feed into `speedEst1` and `speedEst2`, respectively.
- Both estimators output to `pos` (via `out` connections).
2. **Position Calculation**:
- `pos` receives inputs from `speedEst1` (`in1`) and `speedEst2` (`in2`).
- Outputs to `braking` (`in3`).
3. **Braking Logic**:
- `braking` integrates `pos` (`in1`), `speedEst2` (`in2`), and `speedEst1` (`in3`).
- Outputs to `brake` (`out`).
### Key Observations
- Redundancy: Two speed estimators (`speedEst1`, `speedEst2`) suggest fault tolerance or multi-sensor fusion.
- Multi-input braking logic: `braking` combines three data streams (`pos`, `speedEst1`, `speedEst2`) for decision-making.
- Final output: `brake` is activated only after processing all upstream data.
### Interpretation
This system likely implements a safety-critical braking mechanism, such as in autonomous vehicles or advanced driver-assistance systems (ADAS). The dual speed estimators may cross-validate data to reduce errors, while the `pos` module integrates spatial awareness. The `braking` component’s three inputs imply a complex decision tree (e.g., speed thresholds, positional context, and sensor fusion). The absence of feedback loops suggests a linear, deterministic workflow, prioritizing real-time reliability over adaptive learning. Potential improvements could include feedback mechanisms or probabilistic risk assessment in the `braking` logic.