## Image Set: Robot Arm Actions
### Overview
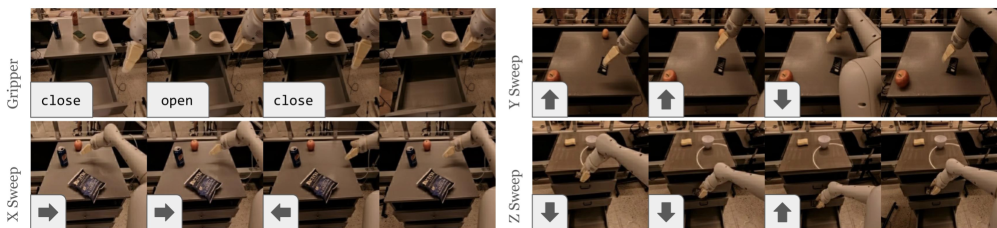
The image shows a series of snapshots depicting a robot arm performing different actions on a table. The actions are categorized by "Gripper" control (open/close) and spatial sweeps along the X, Y, and Z axes. Each action is illustrated with a sequence of three images showing the arm's movement.
### Components/Axes
* **Labels:**
* "Gripper" (top-left)
* "X Sweep" (bottom-left)
* "Y Sweep" (top-right)
* "Z Sweep" (bottom-right)
* **Actions:**
* Gripper: "close", "open", "close"
* X Sweep: Right arrow, Left arrow
* Y Sweep: Up arrow, Down arrow
* Z Sweep: Down arrow, Up arrow
### Detailed Analysis
**1. Gripper Action:**
* The first image shows the robot arm approaching a table with various objects (a can, a sponge, a bowl, and other items). The gripper is in a closed position.
* The second image shows the gripper in an open position, presumably releasing or picking up an object.
* The third image shows the gripper in a closed position again.
**2. X Sweep:**
* The first image shows the robot arm positioned to the left of a table with a bag of chips and an apple. The arrow indicates a movement to the right.
* The second image shows the robot arm in a central position on the table.
* The third image shows the robot arm positioned to the right of the table. The arrow indicates a movement to the left.
**3. Y Sweep:**
* The first image shows the robot arm positioned near the bottom of a table with an apple and a phone. The arrow indicates a movement upwards.
* The second image shows the robot arm in a central position on the table.
* The third image shows the robot arm positioned near the top of the table. The arrow indicates a movement downwards.
**4. Z Sweep:**
* The first image shows the robot arm positioned above a table with a sponge and a cup. The arrow indicates a movement downwards.
* The second image shows the robot arm in a central position above the table.
* The third image shows the robot arm positioned below the table. The arrow indicates a movement upwards.
### Key Observations
* The image demonstrates the robot arm's ability to perform basic actions such as gripping and sweeping along different axes.
* The actions are visually represented with clear directional arrows.
* The objects on the table vary across the different actions, suggesting a variety of tasks the robot arm can perform.
### Interpretation
The image set provides a visual overview of the robot arm's capabilities in manipulating objects and moving along different spatial axes. The "Gripper" action demonstrates the arm's ability to grasp and release objects, while the "X, Y, and Z Sweep" actions showcase its ability to move along different spatial dimensions. This suggests that the robot arm is designed for tasks that require both object manipulation and spatial movement, such as assembly, pick-and-place, or other automated processes. The variety of objects on the table further indicates the arm's versatility in handling different types of items.