## Multi-Panel Robotic Manipulation Sequence
### Overview
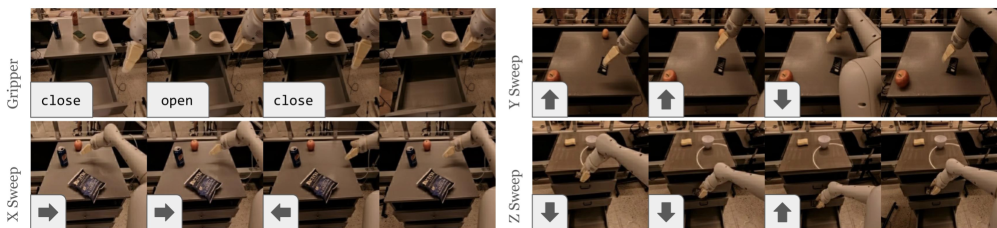
The image is a composite figure showing four distinct sequences of a robotic arm performing manipulation tasks on a tabletop workspace. Each sequence is presented as a horizontal strip of three frames, illustrating a progression of actions. The figure is divided into four labeled panels: "Gripper", "Y Sweep", "X Sweep", and "Z Sweep".
### Components/Axes
* **Panel Layout:** The image is split into a 2x2 grid of panels.
* **Top-Left Panel:** Labeled "Gripper" on the left vertical axis.
* **Top-Right Panel:** Labeled "Y Sweep" on the left vertical axis.
* **Bottom-Left Panel:** Labeled "X Sweep" on the left vertical axis.
* **Bottom-Right Panel:** Labeled "Z Sweep" on the left vertical axis.
* **Common Elements:** Each panel contains three sequential photographic frames showing a white robotic arm (likely a collaborative robot) interacting with objects on a dark gray or black tabletop. The background shows a lab or workshop environment.
* **Annotations:** Each panel includes white text boxes and directional arrow icons overlaid on the images to describe the action or movement.
* **Objects:** Various objects are present on the table across the sequences, including what appears to be a red apple, a dark cylindrical can, a book or magazine, a white plate, and a yellow sponge.
### Detailed Analysis
**1. Gripper Panel (Top-Left)**
* **Sequence:** Three frames showing the robotic arm's end-effector (gripper) interacting with a dark cylindrical object (can).
* **Text Annotations:**
* Frame 1: "close" (in a white box).
* Frame 2: "open" (in a white box).
* Frame 3: "close" (in a white box).
* **Action Trend:** The gripper closes on the object, opens to release it, and then closes again. The object's position appears unchanged between frames 1 and 3.
**2. Y Sweep Panel (Top-Right)**
* **Sequence:** Three frames showing the arm moving an object along the Y-axis (front-to-back relative to the camera view).
* **Directional Icons:**
* Frame 1: Upward-pointing arrow (↑).
* Frame 2: Upward-pointing arrow (↑).
* Frame 3: Downward-pointing arrow (↓).
* **Objects & Action:** The arm holds a dark cylindrical object (can). An apple is visible on the table to the left. The trend shows the arm moving the can away from the camera (↑) in the first two frames, then back towards the camera (↓) in the third frame.
**3. X Sweep Panel (Bottom-Left)**
* **Sequence:** Three frames showing the arm moving an object along the X-axis (left-to-right).
* **Directional Icons:**
* Frame 1: Right-pointing arrow (→).
* Frame 2: Right-pointing arrow (→).
* Frame 3: Left-pointing arrow (←).
* **Objects & Action:** The arm holds a flat, rectangular object (a book or magazine). The trend shows the arm moving the object to the right (→) in the first two frames, then back to the left (←) in the third frame.
**4. Z Sweep Panel (Bottom-Right)**
* **Sequence:** Three frames showing the arm moving an object along the Z-axis (vertical up-and-down).
* **Directional Icons:**
* Frame 1: Downward-pointing arrow (↓).
* Frame 2: Downward-pointing arrow (↓).
* Frame 3: Upward-pointing arrow (↑).
* **Objects & Action:** The arm holds a yellow sponge. A white plate is visible on the table. The trend shows the arm lowering the sponge (↓) in the first two frames, then raising it (↑) in the third frame.
### Key Observations
* **Consistent Structure:** All four panels follow an identical three-frame narrative structure: initiate action, continue action, reverse action.
* **Action Types:** The figure isolates and demonstrates four fundamental robotic manipulation primitives: gripper actuation (open/close) and Cartesian translation along the three primary axes (X, Y, Z).
* **Object Variety:** Different objects are used in each sweep (can, book, sponge), suggesting the tests are performed on items with different physical properties (shape, weight, deformability).
* **Spatial Grounding:** The directional arrows are consistently placed in the lower portion of each frame. The "Gripper" text labels are centered within their frames. The panel labels ("Gripper", "Y Sweep", etc.) are vertically aligned on the far left of each row.
### Interpretation
This image is a technical demonstration or validation figure, likely from a robotics research paper or report. It systematically documents the successful execution of basic motor skills by a robotic system.
* **What it Demonstrates:** The figure provides visual proof that the robotic system can reliably perform discrete, repeatable actions: grasping/releasing an object and moving it precisely along each of the three cardinal axes. The use of different objects implies testing for generalization.
* **Relationship Between Elements:** The four panels are not a single continuous task but a catalog of independent capabilities. Together, they form a foundational skill set required for more complex manipulation tasks (e.g., pick-and-place, assembly). The "Gripper" panel tests the end-effector, while the "Sweep" panels test the arm's positional control.
* **Notable Patterns:** The strict three-frame, action-reverse pattern is a clear methodological choice for clear communication. It shows not just that the robot can move in a direction, but that it has controlled, bidirectional authority over that movement. The lack of visible errors or object drops across all sequences suggests a high degree of reliability in these controlled tests.
* **Underlying Purpose:** This figure serves to establish baseline competency. Before showing a robot performing a complex task like setting a table, a researcher would use a figure like this to prove the robot can first reliably move its arm to a location and open/close its gripper. It answers the fundamental question: "Can the hardware and low-level control system execute basic commands as expected?"