## Screenshot: Robotics Task Interface
### Overview
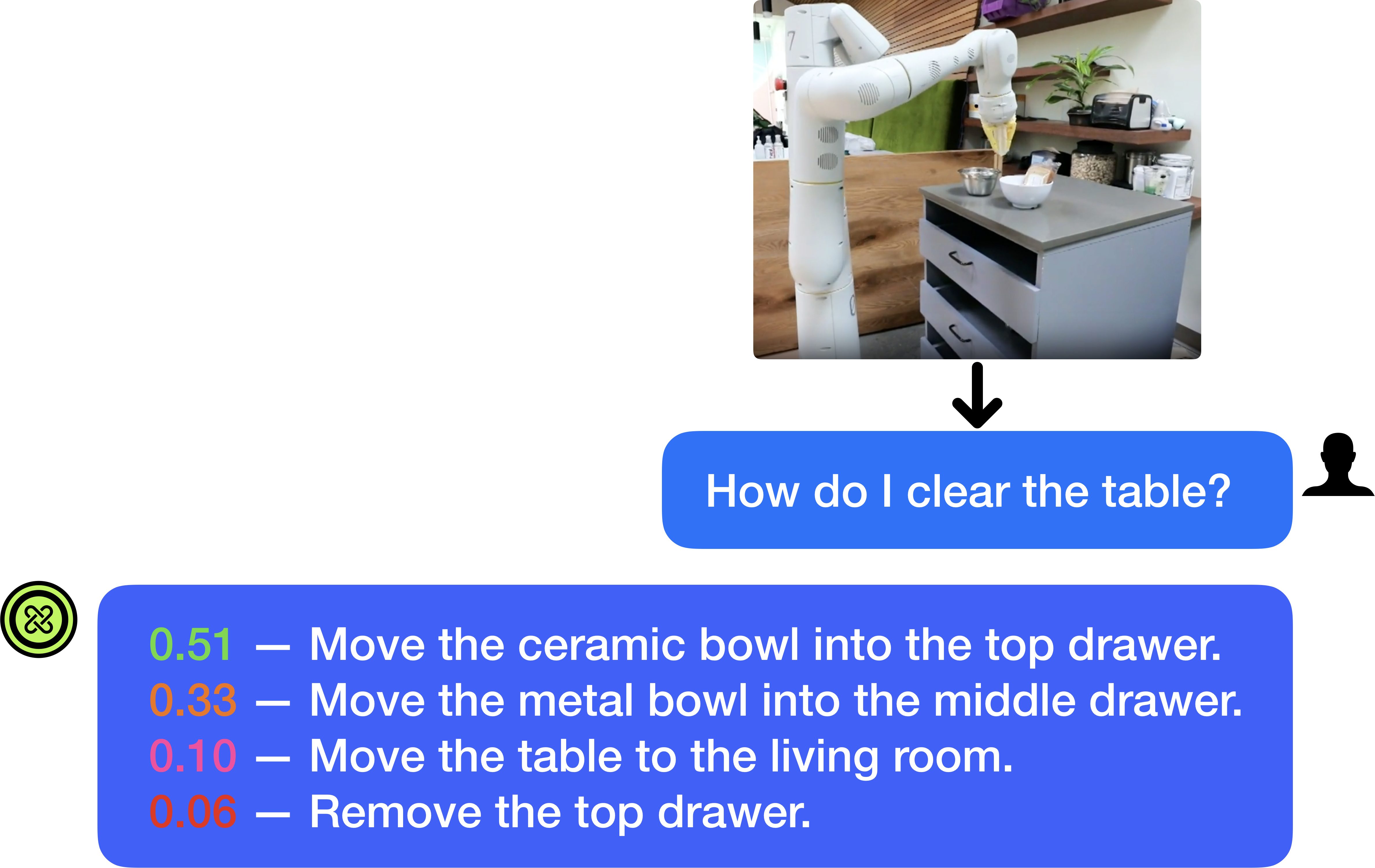
The image depicts a robotics interface showing a robotic arm interacting with a table containing a ceramic bowl and a metal bowl. A text box displays a user query ("How do I clear the table?") and a system response listing four actions with associated probabilities. The interface includes a legend-like structure with colored numerical values and action descriptions.
### Components/Axes
- **Primary Elements**:
- **Robot Arm**: Positioned above a gray cabinet with a tabletop.
- **Table Setup**: Contains a ceramic bowl (left) and a metal bowl (right).
- **Text Boxes**:
1. **User Query**: "How do I clear the table?" (blue background, white text).
2. **System Response**: A list of four actions with probabilities (blue background, white text).
- **Legend-like Structure**:
- **Colors**: Green (0.51), Orange (0.33), Pink (0.10), Red (0.06).
- **Actions**:
- "Move the ceramic bowl into the top drawer." (green)
- "Move the metal bowl into the middle drawer." (orange)
- "Move the table to the living room." (pink)
- "Remove the top drawer." (red)
### Detailed Analysis
- **User Query**:
- Text: "How do I clear the table?"
- Position: Centered below the robot arm image.
- **System Response**:
- **Action 1**: "Move the ceramic bowl into the top drawer."
- Probability: 0.51 (green)
- **Action 2**: "Move the metal bowl into the middle drawer."
- Probability: 0.33 (orange)
- **Action 3**: "Move the table to the living room."
- Probability: 0.10 (pink)
- **Action 4**: "Remove the top drawer."
- Probability: 0.06 (red)
- **Legend-like Structure**:
- Colors are directly embedded in the text box, with no separate legend.
- Spatial grounding: Probabilities are listed in descending order (0.51 > 0.33 > 0.10 > 0.06).
### Key Observations
1. **Probability Distribution**:
- The highest probability (0.51) is assigned to moving the ceramic bowl, suggesting it is the most likely or prioritized action.
- The second-highest probability (0.33) is for moving the metal bowl, indicating a secondary priority.
- Lower probabilities (0.10 and 0.06) suggest less likely actions, such as relocating the table or removing a drawer.
2. **Robot Arm Position**:
- The arm is positioned over the table, implying readiness to execute the highest-probability action (moving the ceramic bowl).
3. **Ambiguity in Action 3**:
- "Move the table to the living room" is an unusual instruction, as tables are typically stationary. This may indicate a fallback or error in the system's logic.
### Interpretation
The interface demonstrates a probabilistic task-planning system for a robot. The system prioritizes actions based on likelihood, with the ceramic bowl being the most probable target. The inclusion of "Move the table to the living room" as a low-probability action raises questions about the system's training data or contextual understanding. The robot's positioning aligns with the highest-probability action, suggesting real-time decision-making. However, the low probability of removing the top drawer (0.06) may indicate a design flaw or edge case not fully addressed by the system.
## Notes
- No non-English text is present.
- All textual elements are transcribed directly from the image.
- The legend-like structure is embedded within the text box, with no separate visual legend.
- The robot arm's interaction with the table is implied but not explicitly labeled.