## Diagram: Scene Understanding and Object Positioning Model
### Overview
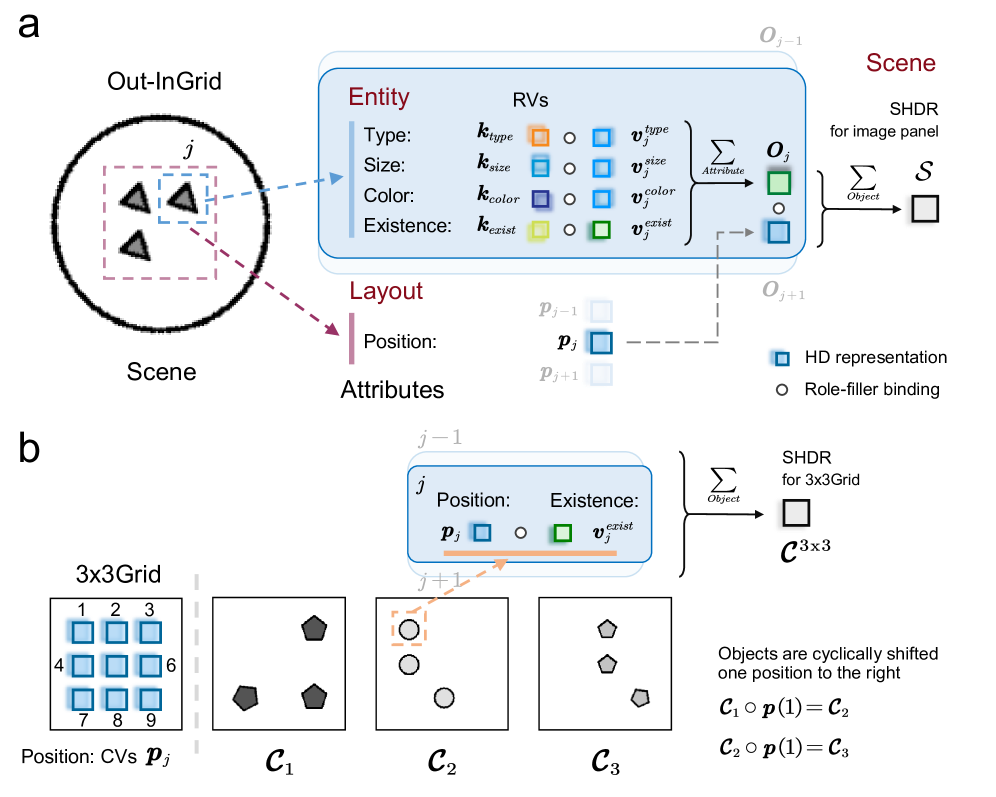
The image presents a technical diagram illustrating a computational model for scene understanding and object positioning. It is divided into two main sections:
- **Part a**: Focuses on entity attributes, scene representation, and spatial relationships.
- **Part b**: Demonstrates a 3x3 grid system for object positioning and cyclic shifts.
### Components/Axes
#### Part a
1. **Out-InGrid**:
- A circular boundary labeled "Scene" containing three gray triangles.
- A dashed red box highlights two triangles with a blue dashed arrow pointing to the "Entity" box.
2. **Entity Box**:
- **Labels**: Type, Size, Color, Existence.
- **RVS (Representation Values)**:
- **Type**: Orange square (`v_j^type`), circle (`o_j`).
- **Size**: Blue square (`v_j^size`), circle (`o_j`).
- **Color**: Purple square (`v_j^color`), circle (`o_j`).
- **Existence**: Green square (`v_j^exist`), circle (`o_j`).
- **Summation**: `∑_Attribute` leads to a green square (`o_j`) and blue square (`o_j`).
3. **Scene Section**:
- **SHDR for Image Panel**: A summation (`∑_Object`) leading to a black square (`S`).
- **HD Representation**: Blue square (`o_j`).
- **Role-Filler Binding**: Circle (`o_j`).
4. **Layout**:
- **Position**: Labeled `p_j-1`, `p_j`, `p_j+1` with a blue square at `p_j`.
#### Part b
1. **3x3 Grid**:
- Labeled positions 1–9 in a 3x3 grid.
- **Cyclic Shifts**:
- `C1` (black pentagons) → `C2` (white circles).
- `C2` → `C3` (gray pentagons).
- `C3` → `C1` (implied by cyclic notation).
2. **Position and Existence**:
- **Position**: Blue square (`p_j`).
- **Existence**: Green square (`v_j^exist`).
3. **SHDR for 3x3 Grid**:
- Summation (`∑_Object`) leading to a black square (`C^3x3`).
### Detailed Analysis
- **Part a**:
- The "Entity" box defines attributes (Type, Size, Color, Existence) with RVS values represented by colored squares (HD representation) and circles (role-filler binding).
- The "Scene" section aggregates object data via SHDR, combining positional and attribute information.
- **Part b**:
- The 3x3 grid uses cyclic shifts (`p(1)`) to reposition objects (e.g., `C1` → `C2`).
- Positions are mapped to grid cells (1–9), with existence confirmed by green squares.
### Key Observations
1. **Color-Coded Attributes**:
- Each attribute (Type, Size, Color, Existence) has distinct colors (orange, blue, purple, green) for clarity.
- Squares represent HD values, circles represent role-filler bindings.
2. **Cyclic Shifts**:
- Objects (`C1`, `C2`, `C3`) are repositioned cyclically, suggesting a dynamic scene update mechanism.
3. **Summation Notation**:
- `∑_Object` and `∑_Attribute` indicate aggregation operations for scene and entity representations.
### Interpretation
This diagram models a scene understanding system where:
- **Entities** are defined by attributes (Type, Size, Color, Existence) with HD and role-filler representations.
- **Scene Composition**: Objects are positioned in a 3x3 grid, with cyclic shifts enabling dynamic updates.
- **SHDR**: Serves as a computational tool to aggregate object data into a unified scene representation (`S` or `C^3x3`).
The model emphasizes spatial relationships (`p_j`, `p_j±1`) and attribute-based entity classification, likely for applications in computer vision or robotics. The cyclic shifts suggest a mechanism for tracking object movements or transformations over time.