## Image Comparison: Robotic Arm Tasks - Ground Truth vs. Generated
### Overview
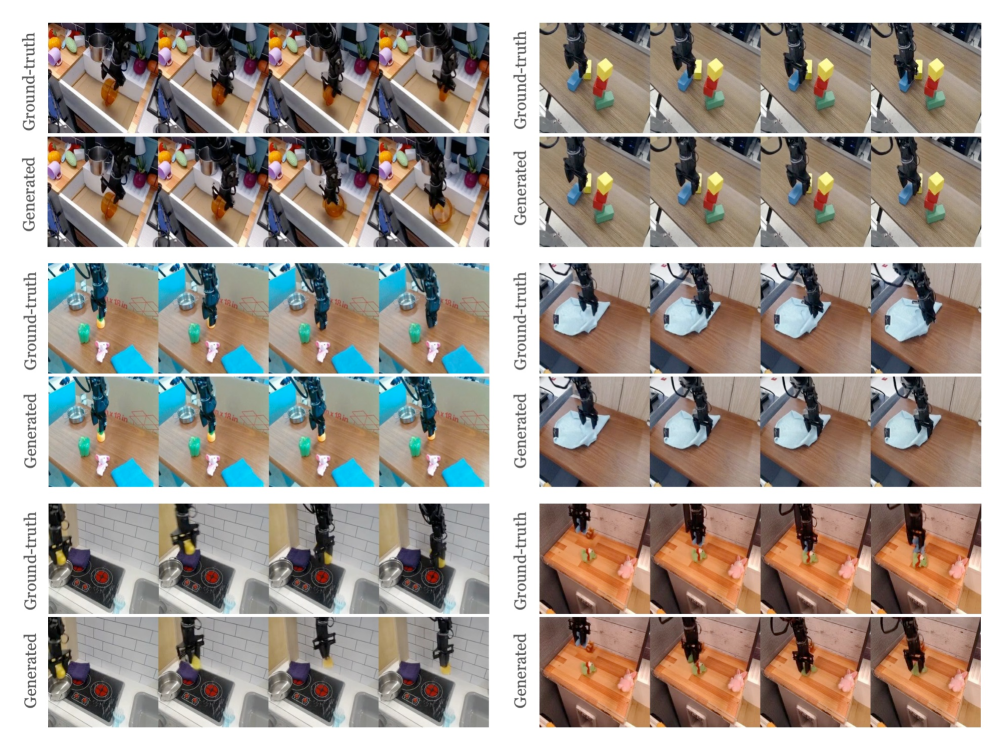
The image presents a visual comparison between "Ground-truth" and "Generated" scenarios of a robotic arm performing various tasks. Each task is depicted in a sequence of four images, showing the arm's progression. The "Ground-truth" row represents the actual or desired outcome, while the "Generated" row shows the outcome produced by a model or algorithm. The tasks include manipulating objects in a sink, stacking blocks, handling a cloth, interacting with objects on a table, and manipulating items on a stovetop.
### Components/Axes
* **Labels:**
* "Ground-truth": Indicates the actual or desired state.
* "Generated": Indicates the state produced by a model.
* **Arrangement:** The image is divided into five sets of tasks, each with two rows (Ground-truth and Generated) and four columns representing sequential steps.
### Detailed Analysis or ### Content Details
**Task 1: Sink Interaction**
* **Ground-truth:** The robotic arm is shown manipulating an orange object inside a sink. The background includes various kitchen items like bottles and utensils.
* **Generated:** The robotic arm is also shown manipulating an orange object in a sink, but the lighting and object placement differ slightly from the ground truth.
**Task 2: Block Stacking**
* **Ground-truth:** The robotic arm is shown stacking a tower of colored blocks (red, yellow, blue, green) on a wooden surface.
* **Generated:** The robotic arm is shown stacking a tower of colored blocks (red, yellow, blue, green) on a wooden surface. The generated image appears very similar to the ground truth.
**Task 3: Cloth Handling**
* **Ground-truth:** The robotic arm is shown interacting with a light blue cloth on a wooden surface.
* **Generated:** The robotic arm is shown interacting with a light blue cloth on a wooden surface. The generated image appears very similar to the ground truth.
**Task 4: Table Interaction**
* **Ground-truth:** The robotic arm is shown interacting with a green object and a pink object on a wooden table. A clear glass bowl and a blue cloth are also present.
* **Generated:** The robotic arm is shown interacting with a green object and a pink object on a wooden table. A clear glass bowl and a blue cloth are also present. The generated image appears very similar to the ground truth.
**Task 5: Stovetop Interaction**
* **Ground-truth:** The robotic arm is shown interacting with a pot on a stovetop. The background includes a white tiled wall and a sink.
* **Generated:** The robotic arm is shown interacting with a pot on a stovetop. The background includes a white tiled wall and a sink. The generated image appears very similar to the ground truth.
### Key Observations
* The "Generated" images generally resemble the "Ground-truth" images, indicating that the model is capable of replicating the robotic arm's actions in these scenarios.
* There are subtle differences in lighting, object placement, and background details between the "Ground-truth" and "Generated" images.
### Interpretation
The image provides a visual assessment of the performance of a model in generating robotic arm actions. The close resemblance between the "Ground-truth" and "Generated" images suggests that the model is reasonably successful in replicating the desired actions. However, the subtle differences highlight areas where the model could be improved, such as in accurately replicating lighting conditions, object placement, and background details. The tasks cover a range of manipulation skills, indicating the model's versatility.