## Robotic Task Sequence Comparison: Ground-Truth vs. Generated
### Overview
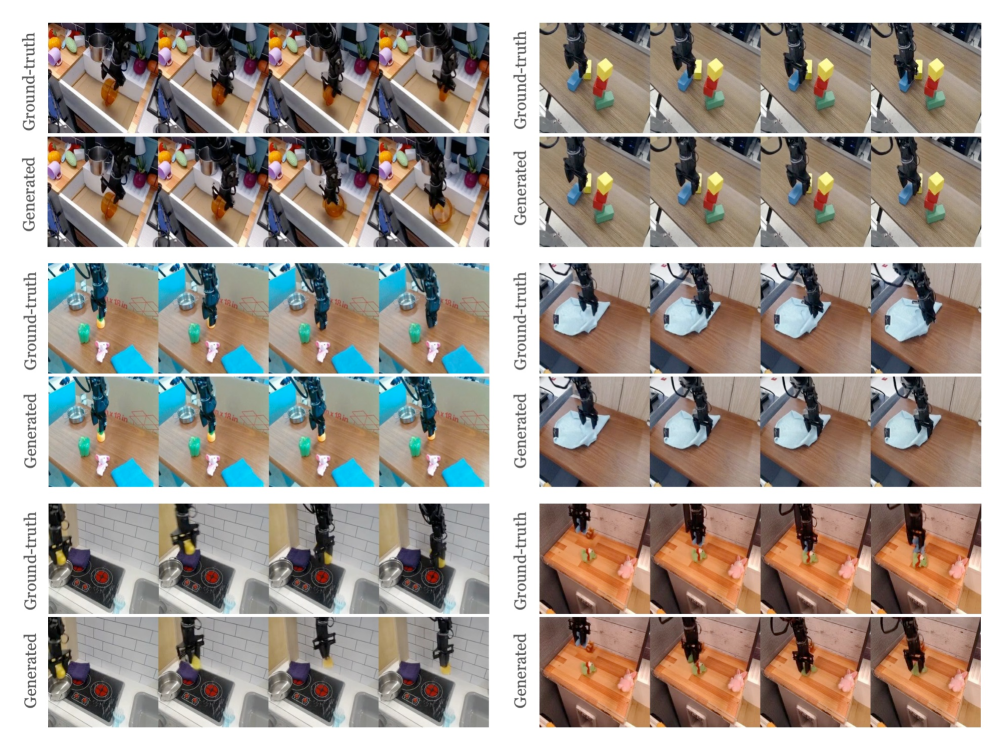
The image is a composite figure displaying six distinct robotic manipulation tasks. Each task is presented in a separate panel, arranged in a 3x2 grid (3 rows, 2 columns). Within each panel, two horizontal rows of four sequential image frames are shown. The top row is labeled "Ground-truth" and the bottom row is labeled "Generated". This structure is designed to visually compare real-world recorded sequences (Ground-truth) with sequences produced by a generative model (Generated) for the same robotic task.
### Components/Axes
* **Layout:** A 3x2 grid of task panels.
* **Panel Structure (per task):**
* **Left-side Labels:** Vertical text labels "Ground-truth" (top row) and "Generated" (bottom row) are positioned to the left of their respective image sequences.
* **Image Sequences:** Each row contains four frames showing a temporal progression of a robotic arm performing a task. The frames are ordered left to right.
* **Content:** Each panel features a black robotic arm (likely a WidowX or similar model) operating in a simulated or controlled real-world environment with various objects on a tabletop or counter.
### Detailed Analysis
The image contains no charts, graphs, or data tables with numerical values. It is a qualitative visual comparison. Below is a breakdown of each task panel, proceeding left-to-right, top-to-bottom.
**Panel 1 (Top-Left): Pouring Liquid**
* **Task:** A robotic arm pours liquid from a clear bottle with an orange label into a clear cup.
* **Objects:** Bottle, cup, other background items (purple container, green object).
* **Sequence:** The arm moves the bottle over the cup, tilts it, and returns it upright.
* **Comparison:** The "Ground-truth" and "Generated" sequences appear visually very similar in object placement and arm motion.
**Panel 2 (Top-Right): Stacking Blocks**
* **Task:** The robotic arm stacks colored blocks (blue, yellow, red, green) into a vertical tower.
* **Objects:** Four colored blocks on a wooden surface.
* **Sequence:** The arm picks up and places blocks sequentially to build the stack.
* **Comparison:** The final stacked configuration in the last frame of both rows is identical. The intermediate positions of the arm and blocks show high correspondence.
**Panel 3 (Middle-Left): Placing Objects**
* **Task:** The arm places a small green object next to a pink object on a blue mat.
* **Objects:** Green object, pink object, blue mat, wooden surface.
* **Sequence:** The arm moves the green object from a starting position to a target location beside the pink object.
* **Comparison:** The spatial relationship between the green and pink objects in the final frame is consistent between the two sequences.
**Panel 4 (Middle-Right): Wiping a Surface**
* **Task:** The robotic arm uses a white cloth or paper towel to wipe a wooden surface.
* **Objects:** White cloth, wooden surface.
* **Sequence:** The arm moves the cloth in a back-and-forth or circular wiping motion across the surface.
* **Comparison:** The path and coverage of the cloth appear closely matched between the ground-truth and generated sequences.
**Panel 5 (Bottom-Left): Operating a Stove**
* **Task:** The arm turns the knob on a simulated stovetop burner.
* **Objects:** Stovetop with black surface and red coil burners, control knob.
* **Sequence:** The arm approaches the knob, grips it, and rotates it.
* **Comparison:** The interaction point and the resulting state of the knob (e.g., rotated position) are consistent.
**Panel 6 (Bottom-Right): Opening a Drawer**
* **Task:** The robotic arm pulls open a wooden drawer.
* **Objects:** Wooden cabinet with a drawer, small pink object on the counter.
* **Sequence:** The arm grips the drawer handle and pulls it outward.
* **Comparison:** The drawer's open position in the final frames of both sequences is visually identical.
### Key Observations
1. **High Fidelity:** The "Generated" sequences demonstrate a high degree of visual and procedural fidelity when compared to the "Ground-truth" sequences across all six diverse tasks.
2. **Task Diversity:** The tasks cover a range of fundamental robotic manipulation skills: pouring, stacking, placing, wiping, turning, and pulling.
3. **Consistent Framing:** The camera angle, lighting, and environment are consistent within each task panel between the two rows, isolating the comparison to the action sequence itself.
4. **No Obvious Artifacts:** At this resolution, the generated frames do not show significant visual artifacts, blurring, or object distortions that would distinguish them from the real frames.
### Interpretation
This image serves as a qualitative evaluation figure, likely from a research paper on video generation or world models for robotics. Its primary purpose is to demonstrate that a generative AI model can produce realistic and accurate video sequences of robotic tasks that are nearly indistinguishable from real recordings.
* **What it suggests:** The model has learned the physical dynamics, object interactions, and sequential logic required for these tasks. It can generate plausible future frames given an initial state or a task description.
* **How elements relate:** The side-by-side, frame-by-frame comparison is the core analytical method. The "Ground-truth" provides the target, and the "Generated" row is the model's prediction. Their visual similarity is the key result.
* **Notable implications:** Such a capability is crucial for training robots using simulated data (sim-to-real transfer), planning future actions by "imagining" outcomes, or creating large-scale synthetic training datasets. The lack of visible discrepancies implies the model's predictions are temporally coherent and physically plausible for these specific, likely well-represented, task types. A full technical assessment would require quantitative metrics (e.g., FID, SSIM) and evaluation on more complex or novel tasks.