## Diagram: Closed-loop Online Planning
### Overview
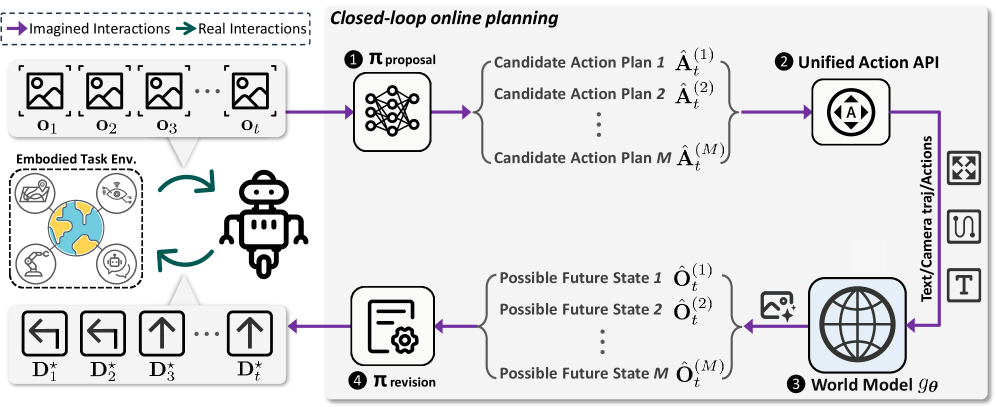
The image presents a diagram illustrating a closed-loop online planning process, likely for a robotic system interacting with an environment. The diagram outlines the flow of information and actions between different components, including imagined interactions, real interactions, action proposal, action API, world model, and revision.
### Components/Axes
The diagram consists of the following key components:
* **Imagined Interactions → Real Interactions:** A sequence of images labeled O1, O2, O3, ..., Ot, representing visual inputs or states. A purple arrow indicates the flow from imagined to real interactions.
* **Embodied Task Env.:** A dashed box containing icons representing different aspects of the environment (e.g., map, drone, robotic arm, chatbot) and the Earth. Arrows indicate interaction between the environment and the robot.
* **Robot:** A simple robot icon.
* **Actions:** A sequence of arrows representing actions, labeled D*1, D*2, D*3, ..., D*t. The arrows indicate left, left, up, and up actions.
* **1. π proposal:** A neural network icon, labeled "π proposal".
* **Candidate Action Plans:** A list of candidate action plans: Candidate Action Plan 1 Ât(1), Candidate Action Plan 2 Ât(2), ..., Candidate Action Plan M Ât(M).
* **2. Unified Action API:** A rounded square containing an icon with arrows pointing in four directions and the letter "A" in the center.
* **Text/Camera traj/Actions:** A vertical list of icons representing text, camera trajectory, and actions.
* **3. World Model gθ:** A globe icon, labeled "World Model gθ".
* **Possible Future States:** A list of possible future states: Possible Future State 1 Ôt(1), Possible Future State 2 Ôt(2), ..., Possible Future State M Ôt(M).
* **4. π revision:** An icon representing a document with a gear, labeled "π revision".
### Detailed Analysis
1. **Imagined Interactions → Real Interactions:**
* A sequence of images, labeled O1, O2, O3, ..., Ot.
* The images are generic landscape icons.
* A purple arrow indicates the flow from imagined to real interactions.
2. **Embodied Task Env.:**
* A dashed box containing icons representing different aspects of the environment.
* Icons include a map, a drone, a robotic arm, a chatbot, and the Earth.
* Arrows indicate interaction between the environment and the robot.
3. **Robot:**
* A simple robot icon.
4. **Actions:**
* A sequence of arrows representing actions, labeled D*1, D*2, D*3, ..., D*t.
* The arrows indicate left, left, up, and up actions.
5. **1. π proposal:**
* A neural network icon, labeled "π proposal".
* The icon represents a multi-layered neural network.
6. **Candidate Action Plans:**
* A list of candidate action plans: Candidate Action Plan 1 Ât(1), Candidate Action Plan 2 Ât(2), ..., Candidate Action Plan M Ât(M).
* The action plans are generated by the "π proposal" neural network.
7. **2. Unified Action API:**
* A rounded square containing an icon with arrows pointing in four directions and the letter "A" in the center.
* The API likely provides a standardized interface for controlling the robot.
8. **Text/Camera traj/Actions:**
* A vertical list of icons representing text, camera trajectory, and actions.
* These are likely different modalities of actions or information that the robot can use.
9. **3. World Model gθ:**
* A globe icon, labeled "World Model gθ".
* The world model represents the robot's understanding of the environment.
10. **Possible Future States:**
* A list of possible future states: Possible Future State 1 Ôt(1), Possible Future State 2 Ôt(2), ..., Possible Future State M Ôt(M).
* These states are predicted by the world model based on the candidate action plans.
11. **4. π revision:**
* An icon representing a document with a gear, labeled "π revision".
* This component likely revises the action plans based on the predicted future states.
### Key Observations
* The diagram illustrates a closed-loop planning process, where the robot interacts with the environment, proposes actions, predicts future states, and revises its plans based on these predictions.
* The process involves multiple components, including a neural network for action proposal, a unified action API, a world model, and a revision mechanism.
* The diagram highlights the importance of both imagined interactions (simulations) and real interactions in the planning process.
### Interpretation
The diagram depicts a sophisticated approach to robot planning, where the robot uses a world model to predict the consequences of its actions and revises its plans accordingly. This closed-loop approach allows the robot to adapt to changing environments and achieve its goals more effectively. The use of a neural network for action proposal suggests that the robot can learn to generate effective action plans from experience. The unified action API provides a standardized interface for controlling the robot, which simplifies the integration of different components. The inclusion of both imagined and real interactions suggests that the robot can learn from both simulation and real-world experience.