TECHNICAL ASSET FINGERPRINT
901c2ea05912e9d0549da83a
Click to view fullscreen
Press ESC or click to close
FOUND IN PAPERS
EXPERT: gemini-2.0-flash VERSION 1
RUNTIME: nugit/gemini/gemini-2.0-flash
INTEL_VERIFIED
## Comparative Performance of Reinforcement Learning Algorithms under Varying Synchronization Conditions
### Overview
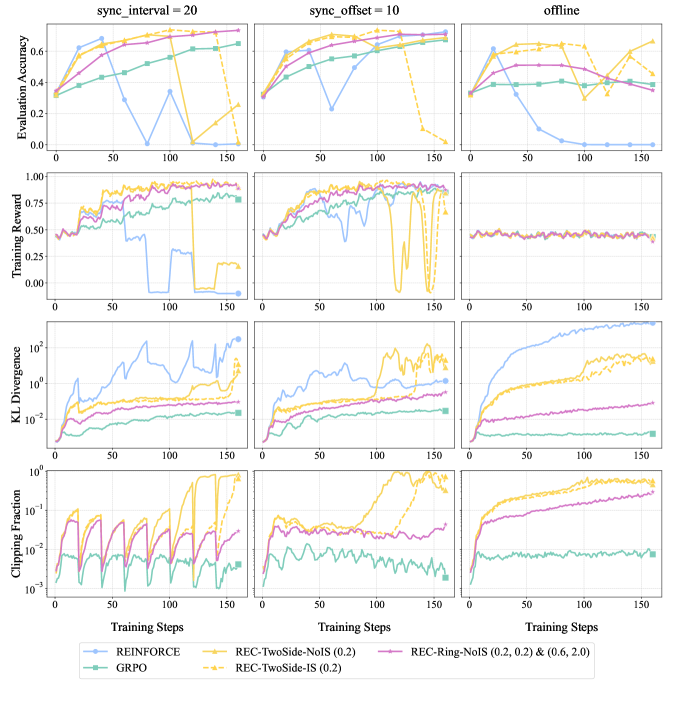
The image presents a series of line charts comparing the performance of different reinforcement learning algorithms (REINFORCE, GRPO, REC-TwoSide-NoIS, REC-TwoSide-IS, REC-Ring-NoIS) across three synchronization conditions: `sync_interval = 20`, `sync_offset = 10`, and `offline`. Performance is evaluated based on Evaluation Accuracy, Training Reward, KL Divergence, and Clipping Fraction, all plotted against Training Steps.
### Components/Axes
* **Title:** Comparative Performance of Reinforcement Learning Algorithms under Varying Synchronization Conditions
* **X-axis (all charts):** Training Steps (range: 0 to 150)
* **Y-axis (row 1):** Evaluation Accuracy (range: 0.0 to 0.6)
* **Y-axis (row 2):** Training Reward (range: 0.00 to 1.00)
* **Y-axis (row 3):** KL Divergence (log scale, range: 10^-2 to 10^2)
* **Y-axis (row 4):** Clipping Fraction (log scale, range: 10^-3 to 10^-1)
* **Synchronization Conditions (columns):**
* Column 1: `sync_interval = 20`
* Column 2: `sync_offset = 10`
* Column 3: `offline`
* **Legend (bottom):**
* Blue: REINFORCE
* Green: GRPO
* Yellow: REC-TwoSide-NoIS (0.2)
* Purple: REC-Ring-NoIS (0.2, 0.2) & (0.6, 2.0)
* Yellow Dashed: REC-TwoSide-IS (0.2)
### Detailed Analysis
**Row 1: Evaluation Accuracy**
* **`sync_interval = 20`:**
* REINFORCE (blue): Starts around 0.3, drops sharply around step 75, recovers slightly, ends around 0.1.
* GRPO (green): Starts around 0.35, gradually increases to around 0.55.
* REC-TwoSide-NoIS (yellow): Starts around 0.35, increases to around 0.65.
* REC-Ring-NoIS (purple): Starts around 0.35, increases to around 0.65.
* REC-TwoSide-IS (yellow dashed): Starts around 0.35, increases to around 0.7.
* **`sync_offset = 10`:**
* REINFORCE (blue): Starts around 0.3, drops sharply around step 75, recovers slightly, ends around 0.2.
* GRPO (green): Starts around 0.35, gradually increases to around 0.6.
* REC-TwoSide-NoIS (yellow): Starts around 0.35, increases to around 0.7.
* REC-Ring-NoIS (purple): Starts around 0.35, increases to around 0.7.
* REC-TwoSide-IS (yellow dashed): Starts around 0.35, increases to around 0.7.
* **`offline`:**
* REINFORCE (blue): Starts around 0.4, drops sharply around step 50, recovers slightly, ends around 0.2.
* GRPO (green): Starts around 0.4, remains relatively stable around 0.4.
* REC-TwoSide-NoIS (yellow): Starts around 0.4, fluctuates, ends around 0.3.
* REC-Ring-NoIS (purple): Starts around 0.4, fluctuates, ends around 0.4.
* REC-TwoSide-IS (yellow dashed): Starts around 0.4, fluctuates, ends around 0.3.
**Row 2: Training Reward**
* **`sync_interval = 20`:**
* REINFORCE (blue): Starts around 0.5, drops sharply around step 75, recovers slightly, ends around 0.0.
* GRPO (green): Starts around 0.5, gradually increases to around 0.8.
* REC-TwoSide-NoIS (yellow): Starts around 0.5, increases to around 0.9.
* REC-Ring-NoIS (purple): Starts around 0.5, increases to around 0.9.
* REC-TwoSide-IS (yellow dashed): Starts around 0.7, increases to around 0.9.
* **`sync_offset = 10`:**
* REINFORCE (blue): Starts around 0.5, drops sharply around step 75, recovers slightly, ends around 0.0.
* GRPO (green): Starts around 0.5, gradually increases to around 0.8.
* REC-TwoSide-NoIS (yellow): Starts around 0.5, increases to around 0.9.
* REC-Ring-NoIS (purple): Starts around 0.5, increases to around 0.9.
* REC-TwoSide-IS (yellow dashed): Starts around 0.7, increases to around 0.9.
* **`offline`:**
* REINFORCE (blue): Not applicable.
* GRPO (green): Starts around 0.5, remains relatively stable around 0.5.
* REC-TwoSide-NoIS (yellow): Starts around 0.5, remains relatively stable around 0.5.
* REC-Ring-NoIS (purple): Starts around 0.5, remains relatively stable around 0.5.
* REC-TwoSide-IS (yellow dashed): Starts around 0.5, remains relatively stable around 0.5.
**Row 3: KL Divergence**
* **`sync_interval = 20`:**
* REINFORCE (blue): Starts around 10^-1, spikes significantly around step 75, ends around 10^2.
* GRPO (green): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-NoIS (yellow): Starts around 10^-1, increases to around 10^1.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, remains relatively stable around 10^-2.
* **`sync_offset = 10`:**
* REINFORCE (blue): Starts around 10^-1, increases to around 10^2.
* GRPO (green): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-NoIS (yellow): Starts around 10^-1, increases to around 10^2.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, remains relatively stable around 10^-2.
* **`offline`:**
* REINFORCE (blue): Starts around 10^-1, increases to around 10^2.
* GRPO (green): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-NoIS (yellow): Starts around 10^-1, increases to around 10^2.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, remains relatively stable around 10^-2.
**Row 4: Clipping Fraction**
* **`sync_interval = 20`:**
* REINFORCE (blue): Not applicable.
* GRPO (green): Starts around 10^-3, remains relatively stable around 10^-3.
* REC-TwoSide-NoIS (yellow): Starts around 10^-2, increases to around 10^-1.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, increases to around 10^-1.
* **`sync_offset = 10`:**
* REINFORCE (blue): Not applicable.
* GRPO (green): Starts around 10^-3, remains relatively stable around 10^-3.
* REC-TwoSide-NoIS (yellow): Starts around 10^-2, increases to around 10^-1.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, increases to around 10^-1.
* **`offline`:**
* REINFORCE (blue): Not applicable.
* GRPO (green): Starts around 10^-3, remains relatively stable around 10^-3.
* REC-TwoSide-NoIS (yellow): Starts around 10^-2, increases to around 10^-1.
* REC-Ring-NoIS (purple): Starts around 10^-2, remains relatively stable around 10^-2.
* REC-TwoSide-IS (yellow dashed): Starts around 10^-2, increases to around 10^-1.
### Key Observations
* REINFORCE's performance is significantly impacted by synchronization, showing a sharp decline in Evaluation Accuracy and Training Reward around step 75 in the `sync_interval = 20` and `sync_offset = 10` conditions.
* GRPO demonstrates more stable performance across all synchronization conditions.
* REC-TwoSide-NoIS and REC-TwoSide-IS generally achieve higher Evaluation Accuracy and Training Reward compared to REINFORCE, but also exhibit higher KL Divergence and Clipping Fraction.
* REC-Ring-NoIS shows stable and relatively low KL Divergence and Clipping Fraction.
* The offline condition results in relatively stable performance for all algorithms except REINFORCE.
### Interpretation
The data suggests that the choice of reinforcement learning algorithm and synchronization strategy significantly impacts performance. REINFORCE is highly sensitive to synchronization parameters, while GRPO exhibits more robust performance. REC-TwoSide-NoIS and REC-TwoSide-IS can achieve higher rewards but at the cost of increased KL Divergence and Clipping Fraction, potentially indicating instability or less efficient learning. REC-Ring-NoIS offers a balance between performance and stability. The offline condition highlights the inherent limitations of certain algorithms when synchronization is completely absent. The sharp decline in REINFORCE's performance around step 75 in the synchronized conditions warrants further investigation, potentially indicating a critical point where the algorithm becomes unstable or diverges.
DECODING INTELLIGENCE...
EXPERT: nemotron-free VERSION 1
RUNTIME: free/nvidia/nemotron-nano-12b-v2-vl:free
INTEL_VERIFIED
## Line Graphs: Performance Metrics Across Training Steps
### Overview
The image contains three columns of line graphs comparing performance metrics across three training methods (REINFORCE, GRPO, REC-TwoSides, REC-RingNoIS) under different synchronization settings ("sync interval = 20", "sync offset = 10", "offline"). Each column contains four subplots: Evaluation Accuracy, Training Reward, KL Divergence, and Clipping Fraction. The x-axis represents training steps (0–150), while y-axes vary by subplot.
---
### Components/Axes
- **Columns**:
- Left: "sync interval = 20" (blue dashed line)
- Middle: "sync offset = 10" (orange dashed line)
- Right: "offline" (no dashed line)
- **Subplots**:
1. **Evaluation Accuracy**: Y-axis = 0.0–1.0
2. **Training Reward**: Y-axis = 0.0–1.0
3. **KL Divergence**: Y-axis = 10–100
4. **Clipping Fraction**: Y-axis = 10–100
- **Legends**: Positioned at the bottom of each column, with colors:
- Blue: REINFORCE
- Green: GRPO
- Orange: REC-TwoSides
- Purple: REC-RingNoIS
- Dashed Orange: REC-TwoSides (0.2) & (0.6, 2.0)
---
### Detailed Analysis
#### **Column 1: sync interval = 20**
1. **Evaluation Accuracy**:
- Blue (REINFORCE): Starts at ~0.6, dips to ~0.4 at 50 steps, then stabilizes.
- Green (GRPO): Flat at ~0.6.
- Orange (REC-TwoSides): Peaks at ~0.8 at 100 steps, then declines.
- Purple (REC-RingNoIS): Smooth increase from ~0.4 to ~0.8.
- Dashed Orange: Peaks at ~0.7 at 100 steps.
2. **Training Reward**:
- Blue: Drops sharply to ~0.2 at 50 steps, then stabilizes.
- Green: Flat at ~0.6.
- Orange: Peaks at ~0.8 at 100 steps.
- Purple: Stable at ~0.7.
- Dashed Orange: Peaks at ~0.7 at 100 steps.
3. **KL Divergence**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Spikes to ~30 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Spikes to ~30 at 100 steps.
4. **Clipping Fraction**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Increases to ~20 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Increases to ~20 at 100 steps.
#### **Column 2: sync offset = 10**
1. **Evaluation Accuracy**:
- Blue: Starts at ~0.5, dips to ~0.3 at 50 steps, then stabilizes.
- Green: Flat at ~0.6.
- Orange: Peaks at ~0.7 at 100 steps.
- Purple: Smooth increase from ~0.5 to ~0.8.
- Dashed Orange: Peaks at ~0.6 at 100 steps.
2. **Training Reward**:
- Blue: Drops to ~0.3 at 50 steps, then stabilizes.
- Green: Flat at ~0.6.
- Orange: Peaks at ~0.7 at 100 steps.
- Purple: Stable at ~0.7.
- Dashed Orange: Peaks at ~0.6 at 100 steps.
3. **KL Divergence**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Spikes to ~25 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Spikes to ~25 at 100 steps.
4. **Clipping Fraction**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Increases to ~15 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Increases to ~15 at 100 steps.
#### **Column 3: offline**
1. **Evaluation Accuracy**:
- Blue: Starts at ~0.4, dips to ~0.2 at 50 steps, then stabilizes.
- Green: Flat at ~0.6.
- Orange: Peaks at ~0.7 at 100 steps.
- Purple: Smooth increase from ~0.5 to ~0.8.
- Dashed Orange: Peaks at ~0.6 at 100 steps.
2. **Training Reward**:
- Blue: Drops to ~0.2 at 50 steps, then stabilizes.
- Green: Flat at ~0.6.
- Orange: Peaks at ~0.7 at 100 steps.
- Purple: Stable at ~0.7.
- Dashed Orange: Peaks at ~0.6 at 100 steps.
3. **KL Divergence**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Spikes to ~20 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Spikes to ~20 at 100 steps.
4. **Clipping Fraction**:
- Blue: Fluctuates between 10–20.
- Green: Stable at ~10.
- Orange: Increases to ~10 at 100 steps.
- Purple: Stable at ~10.
- Dashed Orange: Increases to ~10 at 100 steps.
---
### Key Observations
1. **REC-RingNoIS (Purple)** consistently shows the highest Evaluation Accuracy and Training Reward across all settings, with smooth trends.
2. **REC-TwoSides (Orange)** exhibits the highest KL Divergence and Clipping Fraction, indicating greater exploration but potential instability.
3. **REINFORCE (Blue)** performs poorly in Training Reward and Evaluation Accuracy, with erratic trends.
4. **GRPO (Green)** maintains stable metrics across all settings, suggesting robustness.
5. The dashed orange line (REC-TwoSides variants) shows intermediate performance, combining traits of REC-TwoSides and REC-RingNoIS.
---
### Interpretation
The data suggests that synchronization settings significantly impact performance:
- **Sync Interval = 20** and **Sync Offset = 10** allow REC-RingNoIS to outperform others, likely due to balanced exploration/exploitation.
- **Offline** settings degrade REINFORCE's performance, highlighting its reliance on synchronization.
- REC-TwoSides variants (dashed orange) show trade-offs: higher KL Divergence/Clipping Fraction (exploration) but lower Evaluation Accuracy/Training Reward (stability).
- GRPO's stability across all settings implies it is less sensitive to synchronization parameters, making it a reliable baseline.
Notably, REC-RingNoIS achieves the best balance of high Evaluation Accuracy and low KL Divergence, suggesting it optimizes policy updates effectively. The dashed orange line's intermediate performance indicates that combining REC-TwoSides variants may mitigate some instability while retaining exploration benefits.
DECODING INTELLIGENCE...