This technical document transcribes and analyzes a state-transition diagram representing a task-oriented dialogue between a "Model" (AI agent) and "ALFWorld" (a simulated environment).
### **Document Overview**
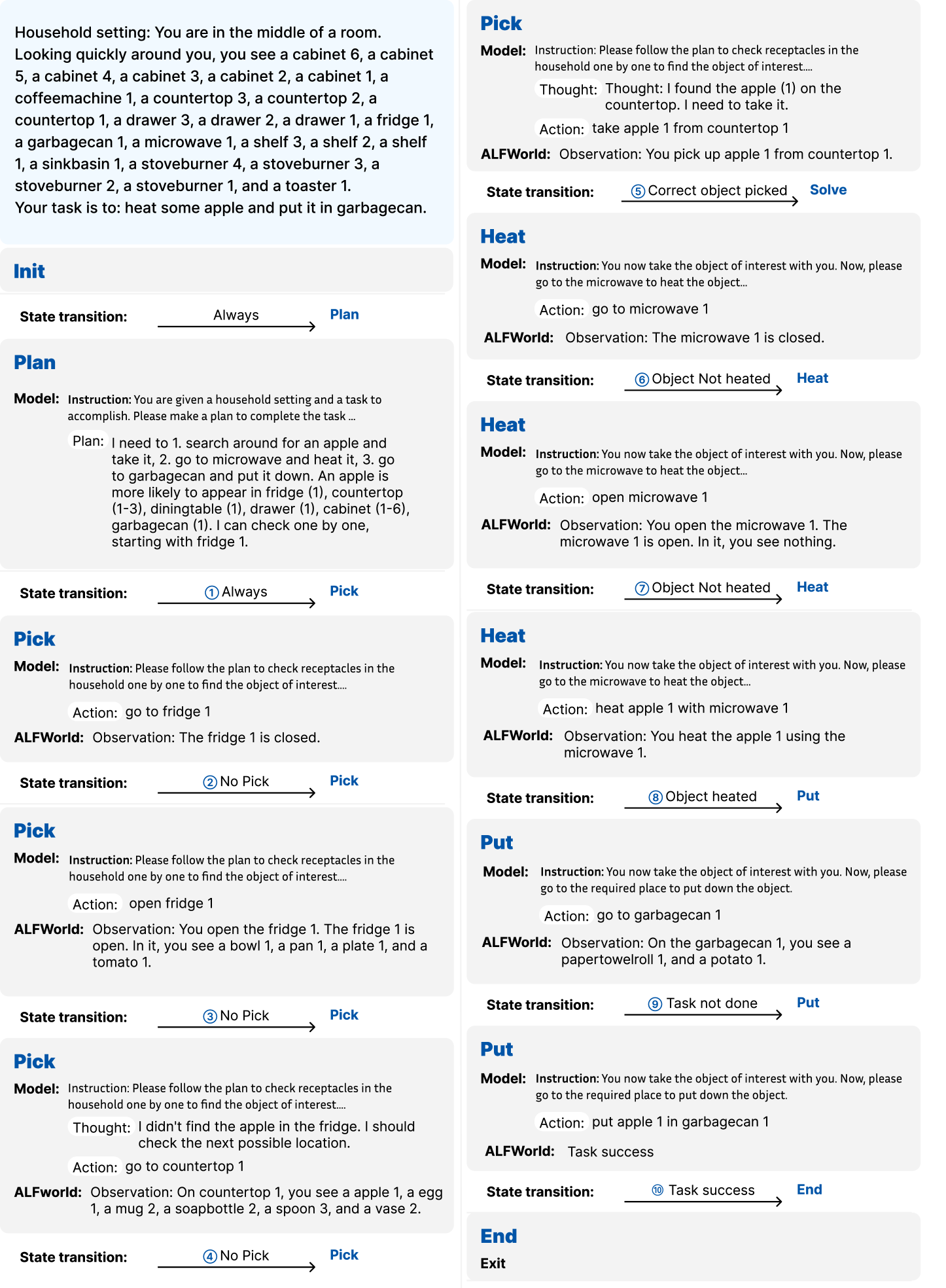
The image depicts a sequential workflow for a robotic or virtual agent tasked with a specific household chore. The document is structured into two columns, read from top-left to bottom-right, following a series of states: **Init**, **Plan**, **Pick**, **Heat**, **Put**, and **End**.
---
### **1. Header / Task Context**
**Household setting:** The agent is in the middle of a room containing:
* **Storage:** cabinet (1-6), drawer (1-3), fridge 1, shelf (1-3).
* **Appliances:** coffeemachine 1, microwave 1, stoveburner (1-4), toaster 1.
* **Surfaces:** countertop (1-3), sinkbasin 1.
* **Waste:** garbagecan 1.
**Task:** "Heat some apple and put it in garbagecan."
---
### **2. State-by-State Execution Flow**
#### **Region: Init**
* **State Transition:** Always $\rightarrow$ **Plan**
#### **Region: Plan**
* **Model Instruction:** Create a plan to complete the task.
* **Plan Text:** "I need to 1. search around for an apple and take it, 2. go to microwave and heat it, 3. go to garbagecan and put it down. An apple is more likely to appear in fridge (1), countertop (1-3), diningtable (1), drawer (1), cabinet (1-6), garbagecan (1). I can check one by one, starting with fridge 1."
* **State Transition:** ① Always $\rightarrow$ **Pick**
#### **Region: Pick (Search Phase)**
* **Step 1 (Fridge):**
* **Action:** go to fridge 1.
* **Observation:** The fridge 1 is closed.
* **State Transition:** ② No Pick $\rightarrow$ **Pick**
* **Step 2 (Open Fridge):**
* **Action:** open fridge 1.
* **Observation:** Fridge 1 contains: bowl 1, pan 1, plate 1, tomato 1.
* **State Transition:** ③ No Pick $\rightarrow$ **Pick**
* **Step 3 (Countertop):**
* **Thought:** Apple not in fridge; check next location.
* **Action:** go to countertop 1.
* **Observation:** Countertop 1 contains: apple 1, egg 1, mug 2, soapbottle 2, spoon 3, vase 2.
* **State Transition:** ④ No Pick $\rightarrow$ **Pick**
* **Step 4 (Acquisition):**
* **Thought:** Found apple (1) on countertop. Need to take it.
* **Action:** take apple 1 from countertop 1.
* **Observation:** You pick up apple 1 from countertop 1.
* **State Transition:** ⑤ Correct object picked $\rightarrow$ **Solve** (Note: Leads to **Heat** state)
#### **Region: Heat (Processing Phase)**
* **Step 1 (Navigation):**
* **Action:** go to microwave 1.
* **Observation:** The microwave 1 is closed.
* **State Transition:** ⑥ Object Not heated $\rightarrow$ **Heat**
* **Step 2 (Preparation):**
* **Action:** open microwave 1.
* **Observation:** Microwave 1 is open. In it, you see nothing.
* **State Transition:** ⑦ Object Not heated $\rightarrow$ **Heat**
* **Step 3 (Execution):**
* **Action:** heat apple 1 with microwave 1.
* **Observation:** You heat the apple 1 using the microwave 1.
* **State Transition:** ⑧ Object heated $\rightarrow$ **Put**
#### **Region: Put (Disposal Phase)**
* **Step 1 (Navigation):**
* **Action:** go to garbagecan 1.
* **Observation:** On garbagecan 1, you see a papertowelroll 1, and a potato 1.
* **State Transition:** ⑨ Task not done $\rightarrow$ **Put**
* **Step 2 (Completion):**
* **Action:** put apple 1 in garbagecan 1.
* **Observation:** Task success.
* **State Transition:** ⑩ Task success $\rightarrow$ **End**
#### **Region: End**
* **Exit**
---
### **3. Component Analysis & Logic Summary**
| Component | Description |
| :--- | :--- |
| **Model** | The decision-making entity providing Instructions, Thoughts, and Actions. |
| **ALFWorld** | The environment providing Observations and feedback on action success. |
| **State Transitions** | Horizontal arrows with circled numbers (1-10) indicating the logic flow based on the outcome of the previous action. |
**Key Trends/Logic:**
1. **Iterative Search:** The "Pick" state repeats (Transitions 2, 3, 4) until the "Correct object picked" condition is met.
2. **State Persistence:** The agent remains in the "Heat" or "Put" state until the specific sub-goal (heating or placing) is verified as complete.
3. **Linear Progression:** The overall flow is strictly linear: Plan $\rightarrow$ Find/Pick $\rightarrow$ Heat $\rightarrow$ Put $\rightarrow$ End.