## Diagram: Vehicle Control System Architecture
### Overview
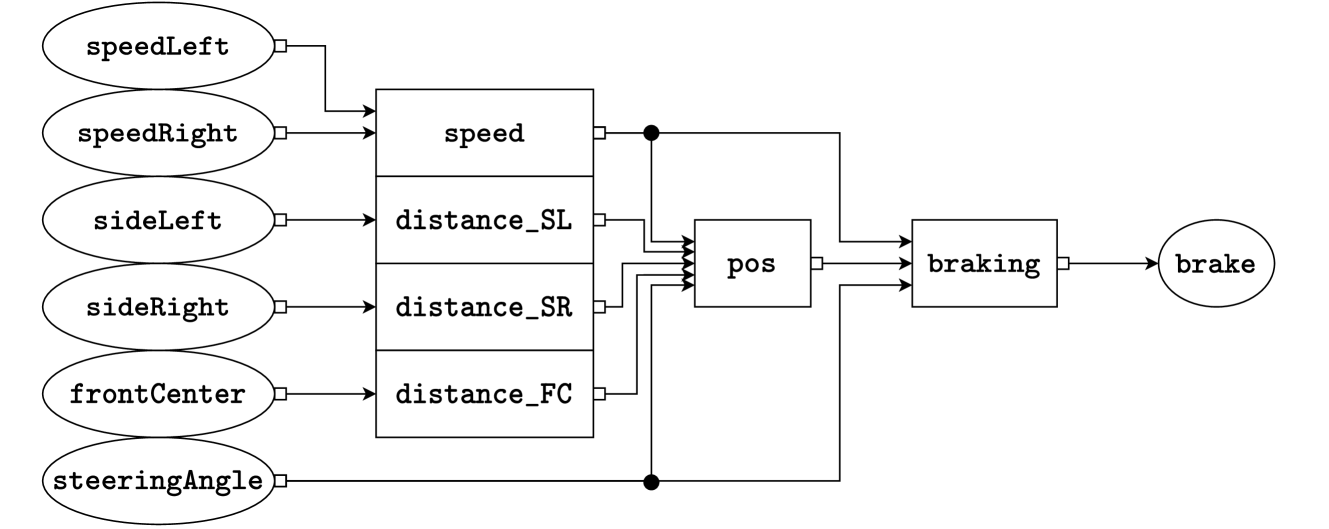
The diagram illustrates a control system for a vehicle, depicting the flow of data from sensor inputs to processing units and final actuation. It includes feedback loops and decision-making components to manage speed, positioning, and braking.
### Components/Axes
- **Input Sensors (Ovals)**:
- `speedLeft`: Measures left-side speed.
- `speedRight`: Measures right-side speed.
- `sideLeft`: Measures distance to the left.
- `sideRight`: Measures distance to the right.
- `frontCenter`: Measures distance to the front center.
- `steeringAngle`: Measures the current steering angle.
- **Processing Units (Rectangles)**:
- `speed`: Aggregates `speedLeft` and `speedRight`.
- `distance_SL`: Processes `sideLeft` input.
- `distance_SR`: Processes `sideRight` input.
- `distance_FC`: Processes `frontCenter` input.
- `pos`: Central processing unit integrating `speed`, `distance_SL`, `distance_SR`, `distance_FC`, and `steeringAngle`.
- `braking`: Receives input from `pos` and outputs to `brake`.
- **Output (Oval)**:
- `brake`: Final actuation command.
### Detailed Analysis
- **Flow Direction**:
- Sensor inputs (`speedLeft`, `speedRight`, `sideLeft`, `sideRight`, `frontCenter`, `steeringAngle`) feed into their respective processing units (`speed`, `distance_SL`, `distance_SR`, `distance_FC`).
- The `pos` unit aggregates data from all processing units and the `steeringAngle` sensor.
- `pos` sends signals to both `braking` and itself via feedback loops.
- `braking` processes `pos` data and outputs to `brake`.
- **Feedback Loops**:
- `pos` has bidirectional connections to `distance_SL`, `distance_SR`, `distance_FC`, and `speed`, indicating real-time adjustments based on sensor data.
### Key Observations
1. **Centralized Control**: The `pos` unit acts as the central hub, integrating all sensor data and steering inputs.
2. **Braking Dependency**: Braking is directly influenced by the `pos` unit, suggesting dynamic braking adjustments based on positional data.
3. **Feedback Mechanism**: Feedback loops from `pos` to distance sensors and speed imply continuous recalibration of inputs.
### Interpretation
This diagram represents a closed-loop control system for autonomous or semi-autonomous vehicles. The system prioritizes real-time data integration (`pos`) to make decisions about speed, steering, and braking. Feedback loops ensure adaptability to changing conditions (e.g., obstacles detected by `distance_SL/SR/FC`). The direct link between `pos` and `braking` highlights safety-critical responsiveness, while the aggregation of left/right speed data (`speed`) suggests balancing maneuvers. The architecture emphasizes redundancy and dynamic adjustment, critical for navigation and collision avoidance.